Tire (Magic Formula)
The tire model determined by the coefficients of the empirical formula X.The boys.
blockType: Engee1DMechanical.Vehicles.Tires.MagicFormula
|
Path in the library: |

Description
Block Tire (Magic Formula) it represents the longitudinal movement of the tire, given by the empirical formula X.PAC [1], which is based on four coefficients. It is possible to simulate tire dynamics under constant or variable road surface conditions.
The longitudinal direction of the tire coincides with the direction of its movement on the road surface.
This block is a component based on the block Tire-Road Interaction (Magic Formula).
To improve the accuracy of the tire model, you can set properties such as ductility, inertia, rolling resistance, and a variable effective rolling radius. However, these properties increase the complexity of the bus model and can slow down the simulation. When calculating the model in real time or when preparing the model for semi-natural modeling, the pliability and inertia of the tire should be neglected.
Bus Model
In this block, a tire is considered as a rigid combination of a wheel and a tire that is in contact with the road and is prone to slipping. When the torque drives the wheel axle, the tire transmits the longitudinal force. , on the road. The tire transmits the resulting reaction in the form of force back to the wheel. This action rotates the wheel, creating a longitudinal motion. If we simulate the pliability of a tire, it will also deform elastically under load. If for the parameter Effective rolling radius model the value is set Load and velocity dependent (Magic Formula), then the radius of the tire will also change depending on the load and rotation speed.
The figure shows the forces acting on the tire.

Variables that determine the bus model:
-
— rolling radius of the tire;
-
— the longitudinal speed of the wheel hub;
-
— longitudinal deformation of the tire;
-
— angular velocity of the wheel;
-
— the angular velocity of the point of contact. If there is no longitudinal deformation of the tire, then ;
-
— the longitudinal speed of the tire tread. Typically, the longitudinal tread velocity of a tire includes a component related to tire rotation , and an additional component related to tire deformation ;
-
— the sliding speed of the contact spot. If there is no longitudinal elastic deformation of the tire, then ;
-
— wheel sliding coefficient for tires without elastic deformation;
-
— the threshold speed of the wheel hub;
-
— the lower bound of the denominator of the slip coefficient;
-
— vertical tire load;
-
— the longitudinal force acting on the tire at the point of contact;
-
— longitudinal stiffness of the tire during deformation;
-
— longitudinal damping of the tire during deformation;
-
— the inertia of the wheel, such that the effective mass is ;
-
— the torque applied to the axle with the wheel.
Kinematics and reaction of the tire
You can simulate rolling, sliding and deformation.
Pumping and sliding_
The equation of translational motion of a non-sliding, non-deformable tire looks like this: . The sliding of the tires leads to a change in the longitudinal force .
The sliding speed of the contact spot is . For a tire without deformation .
The non-smoothed value of the slip coefficient of the contact spot is:
The block defines the denominator of the slip coefficient as:
where — parameter value Lower boundary of slip denominator, VXLOW.
Meaning smoothly changes to in transition areas:
,
.
The unit determines the sliding coefficient according to:
where
-
— parameter value Minimum valid wheel slip, KPUMIN;
-
— parameter value Maximum valid wheel slip, KPUMAX.
Meaning it changes smoothly in transition areas:
,
.
The block defines the smoothing threshold of the sliding coefficient as:
For this equation, the locked, sliding wheel has . For perfect rolling .
The formation
If the check box is selected Compliance, then the block considers the tire as elastic. When the tire is deformed, the point of contact of the tire with the road rotates with angular velocity slightly different from the speed of the wheel , which causes the contact patch to slip. The block defines a deformable tire as a translational spring damper with rigidity and damping .
If the checkbox is not checked Compliance Then , and there is no longitudinal deformation of the tire at any time in the simulation, then .
Dynamics of tires and wheels
This block consists of several sub-components. The equivalent block diagram is shown below.
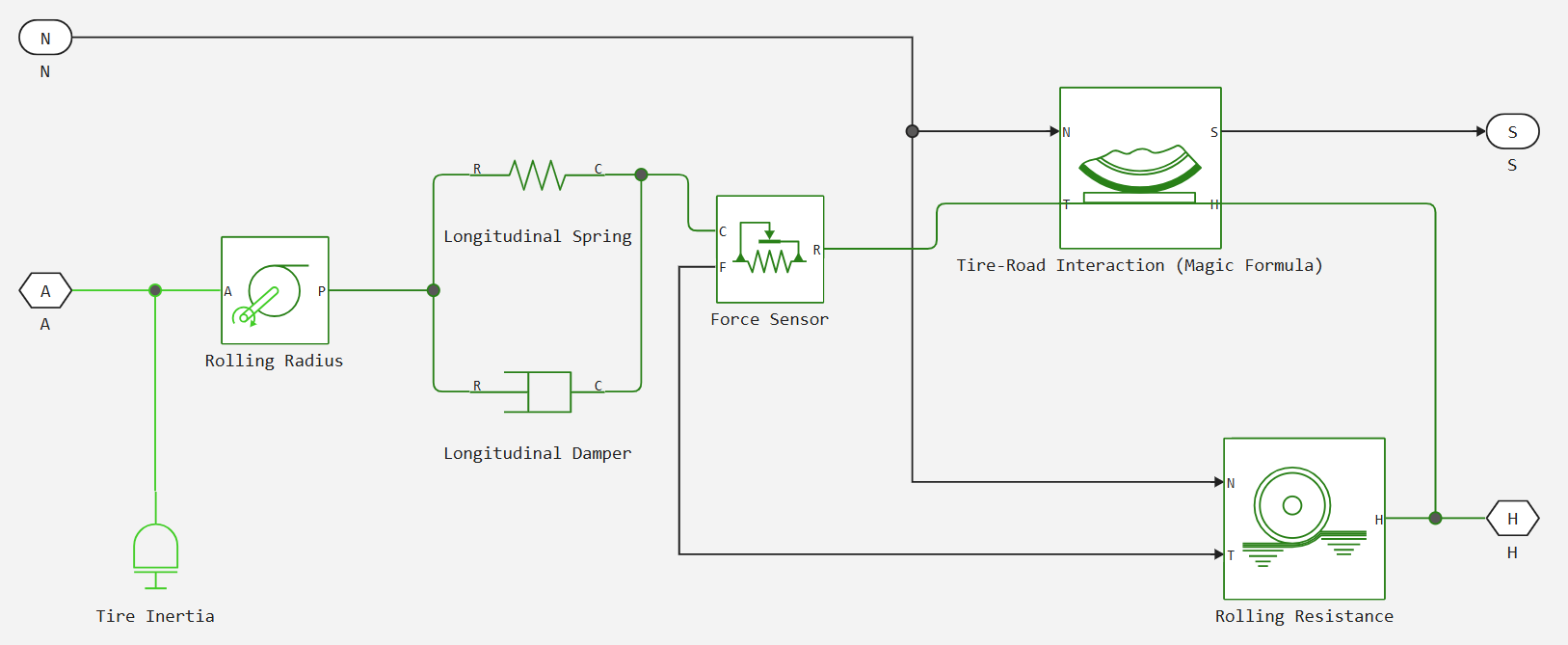
The block simulates the transient and stationary modes, as well as the start and stop. Blocks Translational Spring and Translational Damper are equivalent to rigidity and damping tires, respectively.
Block Tire-Road Interaction (Magic Formula) represents the longitudinal force on the bus as a function and using the empirical formula X .Guys, where — an independent sliding variable, and — input signal on port N.
Block Wheel and Axle — this is the rolling radius of the tire . The inertia value is the effective inertia. . Characteristic function of the bus determines the longitudinal force . Together with the torque of the drive shaft applied to the wheel axis, determines the angular and longitudinal movement of the wheel.
If the tire deformation is not modeled, then the block does not take into account the sub-components. Translational Spring and Translational Damper in an equivalent circuit, and the contact variables are returned to the wheel variables. In this case, the tire actually has infinite stiffness, and the P port of the block Wheel and Axle connects directly to the C port of the unit Force Sensor.
If in the block Rolling Resistance specified other than Pressure and velocity dependent (Magic Formula) rolling resistance model, then the equivalent circuit will not use the block Force Sensor and the T block port Rolling Resistance. If the checkbox is not checked Compliance, then the P port of the block Wheel and Axle connects directly to the C port of the unit Force Sensor or the T port of the unit Tire-Road Interaction (Magic Formula).
Effective rolling radius
This block determines the effective rolling radius, taking into account its increase or decrease due to centrifugal forces, so that
where
-
— effective rolling radius;
-
— increase in the free radius of the tire under the action of centrifugal forces;
-
— vertical tire load;
-
— parameter value Tire nominal vertical load, FNOMIN;
-
— parameter value Vertical stiffness;
-
— the speed of rotation of the wheel;
-
— parameter value Low load stiffness effective rolling radius, BREFF;
-
— parameter value Peak value of effective rolling radius, DREFF;
-
— parameter value High load stiffness effective rolling radius, FREFF;
-
— parameter value Ratio of nominal tire radius with non-rolling free tire radius, Q_RE0;
-
— parameter value Tire radius increase with speed, Q_V1.
Assumptions and limitations
-
The block assumes only longitudinal movement and does not take into account camber, turn or lateral movement.
-
Tire compliance implies a temporary delay in the tire’s response to forces acting on it. Time-delayed simulation increases the accuracy of the model, but increases the simulation time.
Ports
Output
#
S
—
slip
scalar
Details
output port related to the slip coefficient, , between the tyre and the road.
| Data types |
|
| Complex numbers support |
No |
Conserving
#
H
—
hub
translational mechanics
Details
A mechanical progressive port connected to the hub of a wheel.
| Program usage name |
|
#
A
—
axis
`rotational mechanics
Details
A mechanical rotational port associated with an axis.
| Program usage name |
|
Input
#
M
—
vector of coefficients of the empirical formula
vector
Details
Input port specifying the coefficients of H.Paceika’s empirical formula.
Provide the coefficients as a vector .
Dependencies
To use this port, set the parameters Parameterize by to Physical signal Magic Formula coefficients.
| Data types |
|
| Complex numbers support |
No |
#
N
—
normal force, N
scalar
Details
Input port related to the normal force acting on the tyre, in N. The normal force is positive if it acts on the tyre in a downward direction, pressing it against the road surface.
| Data types |
|
| Complex numbers support |
No |
Parameters
Rolling Resistance
# Alpha — exponent in the equation for tyre pressure
Details
The exponent in the equation for tyre pressure.
Dependencies
To use this parameter, tick the checkbox Model rolling resistance, and set the parameters Resistance model to Pressure and velocity dependent (SAE J2452).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Coefficient B —
velocity-dependent force component, B
s/m | s/ft
Details
The velocity-dependent force component of the model equation. The parameters must be greater than zero.
Dependencies
To use this parameter, select the Model rolling resistance checkbox and set the Resistance model parameters to Pressure and velocity dependent (SAE J2452).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Q-coefficient parameters [qsy1, qsy2, qsy3, qsy4, qsy5, qsy6, qsy7, qsy8] — Q-coefficients for the empirical formula
Details
Coefficients for the empirical formula .
qsy1,…, qsy8 - TIR file identifier.
Dependencies
To use this parameter, set the Resistance model parameters to Pressure and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Tire nominal pressure, NOMPRES —
nominal tyre pressure
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Nominal tyre pressure.
NOMPRES is the identifier of the TIR file.
Dependencies
To use this parameter, set the Resistance model parameters to Pressure and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Velocity threshold for rolling resistance —
threshold speed for rolling resistance
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
The speed at which the full rolling resistance force is transferred to the wheel hub. This parameter ensures that the force remains continuous as the direction of speed changes, which increases the numerical stability of the simulation. The parameters must be greater than zero.
Dependencies
To use this parameter, select the checkbox Model rolling resistance.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Coefficient A — velocity-independent force component, A
Details
The velocity-independent force component in the model equation. The parameters must be greater than zero.
Dependencies
To use this parameter, select the checkbox Model rolling resistance, and set the Resistance model parameters to Pressure and velocity dependent (SAE J2452).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Model rolling resistance — roll resistance
Details
Select this check box to take tyre rolling resistance into account in the simulation.
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Resistance model —
rolling resistance model
Constant coefficient | Pressure and velocity dependent (SAE J2452) | Pressure and velocity dependent (Magic Formula)
Details
A model for calculating rolling resistance:
-
Constant coefficient- Rolling resistance is taken into account by means of a constant coefficient. -
Pressure and velocity dependent (SAE J2452)- The rolling resistance is determined in accordance with SAE J2452. -
Pressure and velocity dependent (Magic Formula)- The rolling resistance is determined according to an empirical formula.
Dependencies
To use this parameter, select the check box Model rolling resistance.
| Values |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Hub nominal longitudinal velocity for rolling resistance, LONGVL —
nominal longitudinal speed of the hub
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Nominal longitudinal speed of the hub.
LONGVL - TIR file identifier.
Dependencies
To use this parameter, set the Resistance model parameters to Pressure and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Tire nominal vertical load for rolling resistance, FNOMIN —
normal force
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Nominal normal force on the tyre.
FNOMIN is the identifier of the TIR file.
Dependencies
To use this parameter, set the Resistance model parameters to Pressure and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Beta — exponent in the equation for the normal force
Details
The exponent in the equation for normal force.
Dependencies
To use this parameter, select the checkbox Model rolling resistance, and set the parameters Resistance model to Pressure and velocity dependent (SAE J2452).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Constant coefficient — proportionality constant
Details
A coefficient that establishes the proportionality between the normal force and the rolling resistance force. Parameters must be greater than zero.
Dependencies
To use this parameter, select the check box Model rolling resistance, and set the parameters Resistance model to the value of Constant coefficient.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Coefficient C —
velocity-dependent force component, C
s^2/m^2 | s^2/ft^2
Details
A force component that depends on the square of the velocity in the model equation. The parameters must be greater than zero.
Dependencies
To use this parameter, select the checkbox Model rolling resistance, and set the parameter Resistance model to Pressure and velocity dependent (SAE J2452).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Tire pressure —
tyre pressure
Pa | uPa | hPa | kPa | MPa | GPa | kgf/m^2 | kgf/cm^2 | kgf/mm^2 | mbar | bar | kbar | atm | ksi | psi | mmHg | inHg
Details
Tyre inflation pressure. The parameters must be greater than zero.
Dependencies
To use this parameter, select the check box Model rolling resistance, and for the parameter Resistance model set the value to Pressure and velocity dependent (SAE J2452) or Pressure and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Geometry
#
Rolling radius —
tyre radius under load
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
Tyre radius under load .
Dependencies
To use this parameters, set:
-
for the parameters Parameterize by to be set to.
Load-dependent Magic Formula coefficients`and for the parameters Effective rolling radius model to be set. `Constant radius; -
for the parameters Parameterize by the value of.
Peak longitudinal force and corresponding slip,Constant Magic Formula coefficientsorPhysical signal Magic Formula coefficients.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Peak value of effective rolling radius, DREFF — variable Dreff
Details
Peak value of the effective rolling radius.
DREFF - TIR file identifier.
Dependencies
To use this parameter, set the Parameterize by parameter to and the parameter to . Load-dependent Magic Formula coefficients, and set the parameters Effective rolling radius model to Load and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Effective rolling radius model —
model for calculating the effective rolling radius
Constant radius | Load and velocity dependent (Magic Formula)
Details
Select the model for determining the rolling radius:
-
Constant radius- The rolling radius is constant; -
Load and velocity dependent (Magic Formula)- the rolling radius depends on load and speed.
Dependencies
To use this parameter, set the parameters Parameterize by to . Load-dependent Magic Formula coefficients.
| Values |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Nominal hub longitudinal speed, LONGVL —
nominal longitudinal speed of the hub
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Nominal longitudinal speed of the hub.
LONGVL - TIR file identifier.
Dependencies
To use this parameter, set the Parameterize by parameters to and to . Load-dependent Magic Formula coefficients`and set the parameters Effective rolling radius model to `Load and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Low load stiffness effective rolling radius, BREFF — Breff variable
Details
Effective rolling radius for low load stiffness.
BREFF is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameter to and the parameter to . Load-dependent Magic Formula coefficients, and set the parameters Effective rolling radius model to Load and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Ratio of nominal tire radius with non-rolling free tire radius, Q_RE0 — variable qre0
Details
The ratio of the nominal tyre radius to the radius of the tyre without rolling.
Q_RE0 is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to and to . Load-dependent Magic Formula coefficients`and set the parameters Effective rolling radius model to `Load and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Tire radius increase with speed, Q_V1 — variable qV1
Details
Increase in tyre radius as a function of speed.
Q_V1 - TIR file identifier.
Dependencies
To use this parameter, set the Parameterize by parameters to and to . Load-dependent Magic Formula coefficients, and set the parameters Effective rolling radius model to Load and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Vertical stiffness —
vertical rigidity
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
The vertical stiffness of the tyre.
Dependencies
To use this parameter, set the Parameterize by parameters to and the parameters to . Load-dependent Magic Formula coefficients`and set the parameters Effective rolling radius model to . `Load and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# High load stiffness effective rolling radius, FREFF — variable Freff
Details
Effective rolling radius at high load stiffness.
FREFF is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameter to and the parameter to . Load-dependent Magic Formula coefficients, and set the parameters Effective rolling radius model to Load and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Non-rolling free tire radius, R0 —
tyre free radius
m | um | mm | cm | km | in | ft | yd | mi | nmi
Details
The value of the free rolling radius of the tyre associated with the empirical formula.
R0 is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameter to and the parameter to R0. Load-dependent Magic Formula coefficients, and set the parameters Effective rolling radius model to Load and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Dynamics
# Inertia — inertia model
Details
Select this check box to take the tyre inertia into account.
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Tire inertia —
tyre inertia value
kg*m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
Moment of inertia of the wheel.
Dependencies
To use this parameter, select the check box Inertia.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Longitudinal stiffness —
longitudinal rigidity
N/m | mN/m | kN/m | MN/m | GN/m | kgf/m | lbf/ft | lbf/in
Details
Longitudinal tyre stiffness .
Dependencies
To use this parameter, select the check box Compliance.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Compliance — consideration of tyre pliability
Details
Whether tyre pliability consideration should be included:
-
if the check box Compliance is not selected, the unit neglects dynamic deformation.
-
if the check box Compliance is selected, the unit treats the tyre as a spring-damped system under load.
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
#
Longitudinal damping —
longitudinal damping
N*s/m | kgf*s/m | lbf*s/ft | lbf*s/in
Details
Longitudinal tyre damping .
Dependencies
To use this parameter, select the check box Compliance.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Initial velocity —
initial rotation speed
rad/s | deg/s | rad/min | deg/min | rpm | rps
Details
Initial angular velocity of the tyre .
Dependencies
To use this parameter, select the check box Inertia.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Scaling
# Scale factor of Fx horizontal shift, LHX — horizontal displacement Fx
Details
Scaling factor horizontal shift .
LHX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx nominal vertical load, LFZO — rated vertical load Fx
Details
Scaling factor nominal vertical load .
LFZO is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx shape factor, LCX — shape factor Fx
Details
Scaling factor shape factor .
LCX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx vertical shift, LVX — vertical displacement Fx
Details
Scaling factor vertical shift .
LVX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of rolling resistance, LMY — rolling resistance
Details
Scaling factor rolling resistance.
LMY - TIR file identifier.
Dependencies
To use this parameter, set:
-
for the parameter Parameterize by the value
Load-dependent Magic Formula coefficients; -
for the parameter Resistance model the value of
Pressure and velocity dependent (Magic Formula).
And select the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx peak friction coefficient, LMUX — peak coefficient of friction Fx
Details
Scaling factor peak friction coefficient .
LMUX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx curvature factor, LEX — curvature coefficient Fx
Details
Scaling factor curvature coefficient .
LEX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to Load-dependent Magic Formula coefficients and tick the checkbox Enable scaling coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Scale factor of Fx slip stiffness, LKX — sliding stiffness Fx
Details
Scaling factor sliding stiffness .
LKX is the identifier of the TIR file.
Dependencies
To use this parameter, set the Parameterize by parameters to . Load-dependent Magic Formula coefficients and select the Enable scaling coefficients checkbox.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Enable scaling coefficients — rolling resistance scaling
Details
Select this check box to include scaling factors in the parameterization of the empirical formula.
Dependencies
To use this parameter, check this box:
-
for the parameter Parameterize by the value
Load-dependent Magic Formula coefficients; -
for the parameter Resistance model the value of
Pressure and velocity dependent (Magic Formula).
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
Main
# Magic Formula E-coefficient parameters, [p_Ex1, p_Ex2, p_Ex3, p_Ex4] — E coefficients in the empirical formula
Details
Load-dependent coefficients in the empirical formula.
Dependencies
To use this parameter, set the parameters Parameterize by to Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Slip at peak force at rated load (percent) — slip coefficient in per cent at maximum longitudinal force and rated load
Details
Slip coefficient , expressed as a percentage (%) when the longitudinal force is equal to the maximum value , and the vertical load is equal to the nominal value .
Dependencies
To use this parameter, set the parameters Parameterize by to Peak longitudinal force and corresponding slip.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula V-coefficient parameters, [p_Vx1, p_Vx2] — V coefficients in the empirical formula
Details
Load-dependent coefficients in the empirical formula.
Dependencies
To use this parameter, set the parameters Parameterize by to Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula D-coefficient parameters, [p_Dx1, p_Dx2] — D coefficients in the empirical formula
Details
Load-dependent coefficients in the empirical formula.
Dependencies
To use this parameter, set the parameters Parameterize by to Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula D coefficient — constant factor D in the empirical formula
Details
Coefficient in the empirical formula, independent of load.
Dependencies
To use this parameter, set the parameter Parameterize by to the value of Constant Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula BCD-coefficient parameters, [p_Kx1, p_Kx2, p_Kx3] — K coefficients in the empirical formula
Details
Load-dependent coefficients in the empirical formula.
Dependencies
To use this parameter, set the parameters Parameterize by to Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula E coefficient — constant coefficient E in the empirical formula
Details
Coefficient in the empirical formula, independent of load.
Dependencies
To use this parameter, set the parameter Parameterize by to the value of Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula C coefficient — constant coefficient C in the empirical formula
Details
Coefficient in the empirical formula, independent of load.
Dependencies
To use this parameter, set the parameter Parameterize by to the value of Constant Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Peak longitudinal force at rated load —
maximum longitudinal force at rated load
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Maximum longitudinal force , which the tyre exerts on the wheel when the vertical load is equal to its nominal value .
Dependencies
To use this parameter, set the parameters Parameterize by to . Peak longitudinal force and corresponding slip.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula C-coefficient parameter, p_Cx1 — C coefficient in the empirical formula
Details
Load-dependent coefficient in the empirical formula.
Dependencies
To use this parameter, set the parameter Parameterize by to the value of Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Tire nominal vertical load, FNOMIN —
nominal normal force
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Nominal normal force on the tyre.
FNOMIN is the identifier of the TIR file.
Dependencies
To use this parameter, set the Resistance model parameters to Pressure and velocity dependent (Magic Formula).
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Rated vertical load —
rated load force
N | nN | uN | mN | kN | MN | GN | dyn | lbf | kgf
Details
Rated vertical load force .
Dependencies
To use this parameter, set the Parameterize by parameters to . Peak longitudinal force and corresponding slip.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Magic Formula H-coefficient parameters, [p_Hx1, p_Hx2] — H coefficients in the empirical formula
Details
Load-dependent coefficients in the empirical formula.
Dependencies
To use this parameter, set the parameters Parameterize by to Load-dependent Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Parameterize by —
parameterization method
Peak longitudinal force and corresponding slip | Constant Magic Formula coefficients | Load-dependent Magic Formula coefficients | Physical signal Magic Formula coefficients
Details
Select how the block parameterises the bus using an empirical formula:
-
Peak longitudinal force and corresponding slip- parameterization of the empirical formula using the physical characteristics of the tyre. -
Constant Magic Formula coefficients- set the parameters defining the constant coefficients , , and as scalars. -
Load-dependent Magic Formula coefficients- set the parameters defining the load-dependent coefficients , , , , , and as vectors, one parameter for each coefficient. -
Physical signal Magic Formula coefficients- set the coefficients of the empirical formula through the M port as a four-element vector .
| Values |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
No |
# Magic Formula B coefficient — constant factor B in the empirical formula
Details
Coefficient in the empirical formula, independent of load.
Dependencies
To use this parameter, set the parameter Parameterize by to the value of Constant Magic Formula coefficients.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Advanced
# Maximum valid wheel slip, KPUMAX — maximum value of wheel slip coefficient
Details
Maximum permissible value of the wheel slip coefficient.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Velocity threshold —
tyre slip mode threshold
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Threshold speed , which the unit uses to transition between slip modes.
For details, see [Rolling and Sliding]. Rolling and Sliding for details.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
#
Lower boundary of slip denominator, VXLOW —
lower limit of the denominator of the slip coefficient
m/s | mm/s | cm/s | km/s | m/hr | km/hr | in/s | ft/s | mi/s | ft/min | mi/hr | kn
Details
Lower boundary of the slip factor denominator .
VXLOW - TIR file identifier.
| Units |
|
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
# Minimum valid wheel slip, KPUMIN — minimum value of wheel slip coefficient
Details
The minimum permissible value of the wheel slip coefficient. A negative value means that the wheel slides in the opposite direction to the rotation.
| Default value |
|
| Program usage name |
|
| Evaluatable |
Yes |
Literature
-
I.J.M. Besselink, A.J.C. Schmeitz, H. B. Pacejka, An Improved Magic Formula/Swift Tyre Model That Can Handle Inflation Pressure Changes, Vehicle System Dynamics 48, no. sup1 (December 2010): 337–52. https://doi.org/10.1080/00423111003748088.
-
H.B. Pacejka., Tire and Vehicle Dynamics, Elsevier Science, 2005.