Дифференциал
Зубчатый механизм, позволяющий ведомым валам вращаться с разной скоростью.
Тип: Engee1DMechanical.Transmission.Gears.Differentials.Open
|
Путь в библиотеке: |

Описание
Блок Дифференциал представляет собой зубчатый механизм, который позволяет ведомым шестерням вращаться с разной скоростью. Дифференциалы часто встречаются в автомобилях, где они позволяют разным колесам вращаться с разной скоростью при прохождении поворотов. Порты D, S1, и S2 представляют собой продольный приводной вал и валы солнечной шестерни дифференциала соответственно. Любой из этих валов может приводить в движение два других.
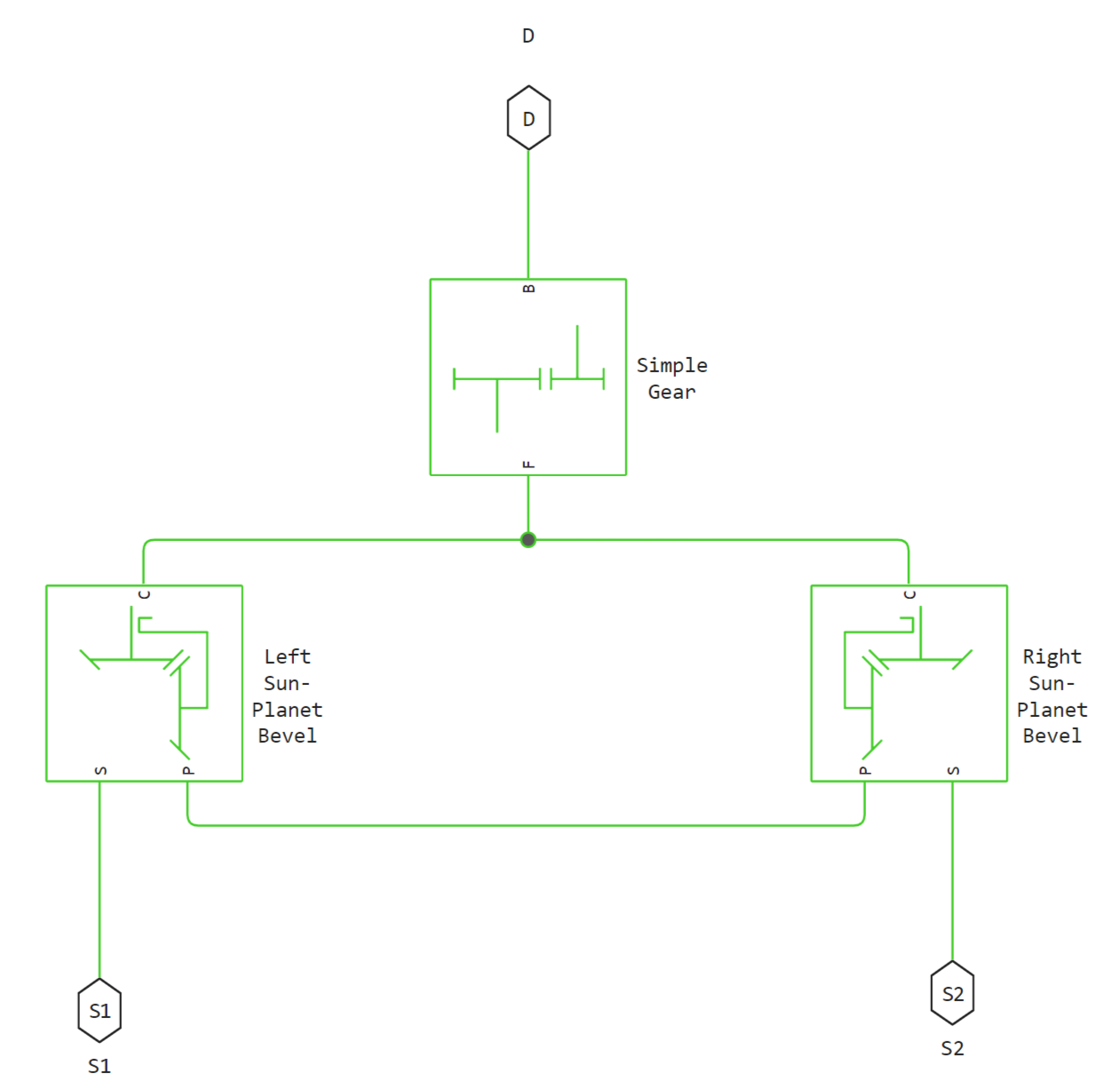
Этот блок моделирует дифференциальный механизм как структурный компонент, основанный на блоках Зубчатая передача и Коническая передача солнце-сателлит.
На рисунке показана эквивалентная блок-схема для блока Дифференциал.
Чтобы повысить точность модели шестерни, вы можете задать такие свойства, как инерция шестерни и потери в зацеплении от вязкого трения. По умолчанию предполагается, что инерция и вязкостные потери пренебрежимо малы.
Этот блок позволяет вам задать инерцию ведущей шестерни и внутренних планетарных шестерен. Чтобы смоделировать инерцию ведомых шестерен, подключите блок Инерция к портам D, S1 и S2.
Тепловая модель
Вы можете моделировать эффекты теплового потока и изменения температуры, включив дополнительный тепловой порт H. Чтобы использовать тепловой порт H, установите для параметра Friction model значение Temperature-dependent efficiency.
Уравнения
Идеальные зубчатые передачи и коэффициенты передачи
Блок Дифференциал накладывает одно кинематическое ограничение на три связанные оси:
где
-
– скорость вращения вала солнечной шестерни S1;
-
– скорость вращения вала солнечной шестерни S2.
Отрицательные значения означают, что дифференциал находится слева от осевой линии. Три степени свободы сводятся к двум независимым парам шестерен: ( ) и ( ). – это ведущая шестерня.
Сумма боковых движений – это преобразованное продольное движение. Разность боковых движений, , не зависит от продольного движения. Общее движение боковых шестерен представляет собой суперпозицию этих двух независимых степеней свободы, которые имеют следующее физическое значение:
-
Продольная степень свободы эквивалентна тому, что два боковых вала вращаются с одинаковой угловой скоростью, , и с фиксированным соотношением по отношению к продольному валу.
-
Дифференциальная степень свободы эквивалентна тому, что продольный ведущий вал остается заблокированным, , где – скорость ведущего вала, а боковые валы вращаются относительно друг друга в противоположных направлениях, .
Крутящие моменты боковых осей ограничиваются крутящим моментом продольной оси таким образом, что суммарный поток мощности равен нулю:
где
-
и – крутящие моменты вдоль боковых осей;
-
– продольный крутящий момент;
-
– потеря мощности.
В идеальном случае, когда кинематические и силовые ограничения объединены, получаем следующее соотношение:
где – передаточное число для продольного приводного вала.
Идеальные ограничения
Эффективное ограничение блока Дифференциал состоит из двух субограничений конического планетарного редуктора.
-
Первое субограничение связано с соединением двух конических шестерен с ведущей частью:
где и – передаточные числа для пар солнечная-планетарная шестерни.
-
Второе субограничение связано с соединением ведущей шестерни в планетарных механизмах с приводным валом:
Передаточные числа конических планетарных передач, в зависимости от радиусов солнечных и планетарных колес, представляются в следующем виде:
Блок Дифференциал реализован с учетом того, что , оставляя свободным для настройки.
Неидеальные зубчатые передачи и потери в передачах
В неидеальном случае (подробнее см. в статье Моделирование механических передач с потерями).
Допущения и ограничения
-
Инерция зубчатых колес пренебрежимо мала.
-
Шестерни рассматриваются как твердые тела.
-
Кулоновское трение замедляет симуляцию (подробнее см. здесь).
Порты
Ненаправленные
#
D
—
приводной вал
вращательная механика
Details
Ненаправленный порт, связанный с продольным приводным валом.
| Имя для программного использования |
|
#
S1
—
солнечная шестерня S1
вращательная механика
Details
Ненаправленный порт, связанный с солнечной шестерней S1.
| Имя для программного использования |
|
#
S2
—
солнечная шестерня S2
вращательная механика
Details
Ненаправленный порт, связанный с солнечной шестерней S2.
| Имя для программного использования |
|
#
H
—
тепловой поток
тепло
Details
Ненаправленный порт, связанный с тепловым потоком.
Тепловой порт позволяет моделировать тепловой поток между блоком и подключенной сетью.
Зависимости
Чтобы использовать этот порт, установите для параметра Friction model значение Temperature-dependent efficiency.
| Имя для программного использования |
|
Параметры
Основные
#
Расположение главной пары —
расположение кольцевой шестерни
Слева от осевой линии | Справа от осевой линии
Details
Расположение конической кольцевой шестерни относительно центральной линии редуктора.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
# Передаточное отношение шестерней главной пары (NC/ND) — передаточное число ведущей шестерни к шестерне приводного вала
Details
Постоянное передаточное число, , оборотов ведущей шестерни к продольному вращению шестерни приводного вала, определяемое числом зубьев ведущей шестерни, деленным на число зубьев шестерни приводного вала. Это передаточное число должно быть >0.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Потери в передаче
#
Модель трения —
модель трения
Без потерь в передаче | Постоянный КПД | КПД, зависящий от температуры
Details
Модель трения в передаче. Задается как:
-
No meshing losses - Suitable for HIL simulation– зубчатое зацепление считается идеальным. -
Constant efficiency– передача крутящего момента между зубчатыми парами снижается на постоянную величину КПД, , таким образом, что . -
Temperature-dependent efficiency– передача крутящего момента между парами зубчатых колес определяется по интерполяционной таблице соответствия температуры и КПД.
| Значения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
# КПД дифференциала и главной пары — вектор значений КПД передачи крутящего момента
Details
Вектор значений КПД, [ ], от ведущей к ведомой солнечной шестерне и от несущей к продольному приводному валу соответственно. Элементы вектора должны находиться в диапазоне (0,1].
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Constant efficiency.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Температура —
вектор значений температуры
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
Вектор значений температур, используемых для построения интерполяционной таблицы соответствия температуры и КПД. Элементы вектора должны монотонно возрастать.
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Temperature-dependent efficiency.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# КПД дифференциала — вектор значений КПД передачи крутящего момента от ведущей солнечной к ведомой солнечной шестерне
Details
Вектор соотношения выходной и входной мощности, описывающий поток мощности от ведущей солнечной к ведомой солнечной шестерне, . Блок использует эти значения для построения интерполяционной таблицы соответствия температуры и КПД.
Каждый элемент – это значение КПД, относящееся к соответствующему значению температуры в векторе значений параметра Temperature. Длина вектора должна быть равна длине вектора параметра Temperature. Каждый элемент вектора должен находиться в диапазоне (0,1].
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Temperature-dependent efficiency.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
# КПД главной пары — вектор значений КПД передачи крутящего момента от ведущей шестерни к приводному валу
Details
Вектор соотношения выходной и входной мощности, описывающий поток мощности от ведущей шестерни к приводному валу, . Блок использует эти значения для построения интерполяционной таблицы соответствия температуры и КПД.
Каждый элемент – это значение КПД, относящееся к соответствующему значению температуры в векторе значений параметра Temperature. Длина вектора должна быть равна длине вектора параметра Temperature. Каждый элемент вектора должен находиться в диапазоне (0,1].
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Temperature-dependent efficiency.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Порог мощности потерь дифференциала и главной пары —
минимальные значения пороговой мощности
Вт | мкВт | мВт | кBт | MBт | ГВт | V*A | HP_DIN
Details
Вектор пороговых значений мощности для зубчатого зацепления с солнечной шестерней и приводным валом [ ] соответственно. Выше этих значений применяются значения полных КПД. Ниже этих значений гиперболическая функция тангенса сглаживает значения КПД.
-
Если установить для параметра Friction model значение
Constant efficiency, блок снижает потери до нуля, когда мощность не передается. -
Если установить для параметра Friction model значение
Temperature-dependent efficiency, блок сглаживает значения КПД между нулем в состоянии покоя и значениями, указанными в интерполяционных таблицах соответствия температуры и КПД.
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Constant efficiency или Temperature-dependent efficiency.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Вязкостные потери
#
Коэффициенты вязкого трения дифференциала и главной пары —
коэффициенты вязкого трения между шестернями
N*m*s/rad | mN*m*s/rad | kN*m*s/rad | kgf*m*s/rad | lbf*ft*s/rad
Details
Вектор коэффициентов вязкого трения, [ ], для планетарной передачи и приводного вала соответственно.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Момент инерции
# Момент инерции — модель инерции
Details
Установите этот флажок, чтобы включить модель инерции для зубчатой передачи.
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Нет |
#
Момент инерции водила —
момент инерции ведущей шестерни
кг*м^2 | g*m^2 | kg*cm^2 | g*см^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
Момент инерции ведущей планетарной передачи.
Зависимости
Чтобы использовать этот параметр, установите флажок для параметра Inertia.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Момент инерции сателлита —
момент инерции планетарной шестерни
кг*м^2 | g*m^2 | kg*cm^2 | g*см^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
Момент инерции планетарной передачи.
Зависимости
Чтобы использовать этот параметр, установите флажок для параметра Inertia.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
Тепловой порт
#
Теплоемкость —
теплоемкость
Дж/К | кДж/К
Details
Тепловая энергия, необходимая для изменения температуры компонента на один градус. Чем больше теплоемкость, тем более устойчив компонент к изменению температуры.
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Temperature-dependent efficiency.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |
#
Начальная температура —
начальная температура
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
Температура блока в начале симуляции. Начальная температура задает начальное значение КПД компонентов в соответствии с указанными для них векторами.
Зависимости
Чтобы использовать этот параметр, установите для параметра Friction model значение Temperature-dependent efficiency.
| Единицы измерения |
|
| Значение по умолчанию |
|
| Имя для программного использования |
|
| Вычисляемый |
Да |