Ravigneaux Gear
有两个太阳齿轮和两组行星齿轮的行星齿轮。
模块类型: Engee1DMechanical.Transmission.Gears.Planetary.Ravigneaux
|
库中的路径: |

资料描述
座 Ravigneaux Gear 它是具有两个太阳和行星齿轮的行星机构。 两个太阳齿轮位于中心并沿公共旋转轴线纵向间隔开。 这些齿轮中较小的一个与一个内部行星齿轮啮合,该内部行星齿轮又与一个外部行星齿轮啮合。 外行星齿轮,其长度复盖两个太阳齿轮之间的距离,与较大的太阳齿轮和冠齿轮两者啮合。
驾驶员将行星齿轮保持在不同的半径。 与传动轴刚性连接的驱动轮可以相对于太阳能和电晕齿轮作为单个单元旋转。 位于行星齿轮和驱动器之间的枢转铰链允许齿轮绕其纵向轴线旋转。
太阳、行星和日冕齿轮的相对角速度由它们之间的运动关系决定。 有关详细信息,请参阅 方程。

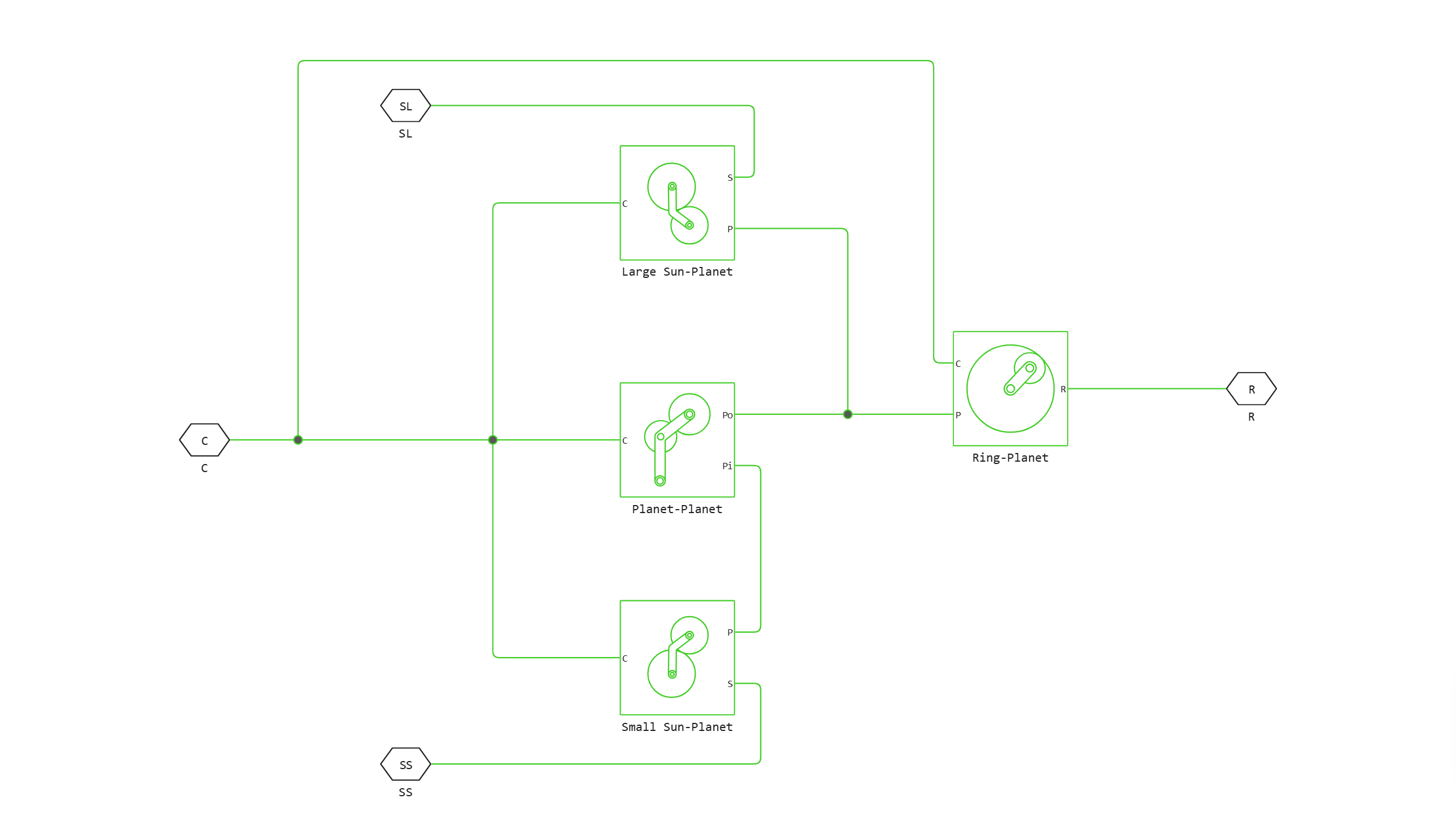
座 Ravigneaux Gear 它由块 Sun-Planet, Planet-Planet 和 Ring-Planet. 图中示出了该块的等效框图。
为了提高齿轮模型的精度,可以设置齿轮惯性、齿轮传动损失和粘性损失等特性。 默认情况下,假设齿轮惯性和粘性损失可以忽略不计。 块允许您设置内部行星齿轮的惯性。 为了模拟驾驶员的惯性,大太阳齿轮,小太阳齿轮和冠齿轮,连接块 Inertia 到端口 C,SL,SS 和 R。
方程
理想的限制和齿轮比
座 Ravigneaux Gear 对四个连接的车轴和两个内轮(内部和外部行星齿轮)施加四个运动学和四个几何约束:
哪里
-
-内驱动器的半径;
-
-驱动器的角速度;
-
-小太阳齿轮的半径;
-
-小太阳齿轮的角速度;
-
-内行星变速器的半径;
-
-内部行星传动的角速度;
-
-外部驱动器的半径;
-
-大太阳齿轮的半径;
-
-大太阳齿轮的角速度;
-
-外部行星变速器的半径;
-
-外部行星变速器的角速度;
-
-冠齿轮的角速度。
冠齿轮与太阳齿轮的传动比:
哪里
-
-冠齿轮与小太阳齿轮的传动比;
-
-牙冠齿轮的齿数;
-
-小太阳齿轮的齿数;
-
-冠齿轮与大太阳齿轮的传动比;
-
-大型太阳齿轮的齿数。
就这些传动比而言,主要的运动学限制如下:
的六个自由度减少为两个独立的自由度。 齿轮对: 和 .
| 齿轮比 必须严格大于齿轮比 . 齿轮比 它必须严格不止一个。 |
扭矩传输如下:
哪里
-
-将扭矩传递到小型太阳齿轮;
-
-扭矩传递到冠齿轮;
-
-在小太阳齿轮和冠齿轮之间传递扭矩时的损失;
-
-将扭矩传递到大型太阳齿轮;
-
-在大太阳齿轮和冠齿轮之间传递扭矩的损失。
理想情况下,当没有扭矩损失时。, .
齿轮没有理想的限制和损失_
在不完美的情况下 .
假设和限制
-
齿轮作为固体处理。
-
库仑摩擦会减慢仿真速度(有关更多信息,请参阅 这里)。
港口
非定向
#
SL
—
大型太阳能齿轮
旋转力学
Details
与大太阳齿轮连接的非定向端口。
| 程序使用名称 |
|
#
党卫队
—
小型太阳能齿轮
旋转力学
Details
小太阳齿轮连接的无定向端口。
| 程序使用名称 |
|
#
C
—
行星传动卫星载体
旋转力学
Details
行星变速器的卫星载体连接的非定向端口。
| 程序使用名称 |
|
#
H
—
热流量
温暖
Details
热流连接的非定向端口。 热流通过改变齿轮的温度来影响动力传递的效率。
依赖关系
要使用此端口,请设置参数 Friction model 意义 Temperature-dependent efficiency.
| 程序使用名称 |
|
#
R
—
皇冠齿轮
旋转力学
Details
冠齿轮连接的非定向端口。
| 程序使用名称 |
|
参数
惯量
#
Outer planet gear inertia —
外行星变速器的转动惯量
kg*m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
外行星变速器的转动惯量。 此值必须为正值。
依赖关系
若要使用此选项,请选中该选项旁边的复选框 Inertia .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Inertia — 惯性模型
Details
块的惯性模型:
-
复选框设置为模拟齿轮系的惯性。
-
Unchecked-忽略齿轮系的惯性。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
#
Inner planet gear inertia —
内部行星变速器的转动惯量
kg*m^2 | g*m^2 | kg*cm^2 | g*cm^2 | lbm*in^2 | lbm*ft^2 | slug*in^2 | slug*ft^2
Details
内行星变速器的转动惯量。 此值必须为正值。
依赖关系
若要使用此选项,请选中该选项旁边的复选框 Inertia .
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
散热孔
#
Initial temperature —
初始温度
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
块在模拟开始时的温度。 初始温度根据组件的效率向量设置组件的初始效率。
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Thermal mass —
热质量
J/K | kJ/K
Details
将组件的温度改变一个单位温度所需的热能。 热质量越大,组件对温度变化的抵抗力就越强。
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
啮合损耗
# Large sun-planet, small sun-planet, ring-planet and planet-planet ordinary efficiencies — 扭矩传递效率
Details
扭矩传递的矢量效率 对于齿轮副,大太阳是卫星,小太阳是卫星,冠是卫星和卫星分别是卫星。 向量的元素必须在范围内 (0,1].
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Constant efficiency.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Large sun-carrier, small sun-carrier, large sun planet-carrier and small sun planet-carrier power thresholds —
齿轮的最小功率阈值:大型太阳能齿轮传动,小型太阳能齿轮传动,大型太阳卫星传动和小型太阳卫星传动
W | uW | mW | kW | MW | GW | V*A | HP_DIN
Details
功率阈值的向量,在该向量上应用完全效率。 按以下顺序输入阈值:大太阳齿轮、小太阳齿轮、大太阳卫星齿轮和小太阳卫星齿轮,都相对于驾驶员。 在这些值以下,效率由双曲正切函数平滑。
如果为参数 Friction model 值设置 Constant efficiency,单位减少效率损失到零在没有力量转移。 如果为参数 Friction model 值设置 Temperature-dependent efficiency 该装置将效率从静止时的零平滑到功率阈值时温度和效率插值表中所示的值。
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Small sun-planet efficiency — 从小太阳齿轮到行星齿轮的扭矩传递效率
Details
输出和输入功率比的矢量,描述从小太阳齿轮到行星齿轮的功率流 . 该模块使用这些值构建温度与效率的一维插值表。
每个元素表示与矢量中的温度相关的效率 Temperature . 向量的长度必须等于向量的长度 Temperature . 矢量的每个元素都必须在范围内 (0,1].
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Ring-planet efficiency — 从冠齿轮到行星齿轮的扭矩传递效率
Details
输出和输入功率比的矢量,描述从冠齿轮到外部行星齿轮的功率流 . 该模块使用这些值构建温度与效率的一维插值表。
每个元素表示与矢量中的温度相关的效率 Temperature . 向量的长度必须等于向量的长度 Temperature . 向量的每个元素都必须在范围内 (0,1].
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Friction model —
摩擦模型
No meshing losses - Suitable for HIL simulation | Constant efficiency | Temperature-dependent efficiency
Details
块的摩擦模型:
-
No meshing losses - Suitable for HIL simulation-完美的齿轮啮合。 -
Constant efficiency-通过恒定的效率减少了齿轮对之间的扭矩传递 ,这样 . -
Temperature-dependent efficiency-通过温度插值表确定成对齿轮之间扭矩的传递。
| 值 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
无 |
# Large sun-planet efficiency — 从大型太阳齿轮到行星齿轮的扭矩传递效率
Details
输出和输入功率比的矢量,描述从大太阳齿轮到行星齿轮的功率流 . 该模块使用这些值构建温度与效率的一维插值表。
每个元素表示与矢量中的温度相关的效率 Temperature . 向量的长度必须等于向量的长度 Temperature . 向量的每个元素必须在范围内 (0,1].
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Planet-planet efficiency — 卫星交互效率
Details
输出和输入功率比的矢量,描述从小行星齿轮到大行星齿轮的功率流 . 该模块使用这些值构建温度与效率的一维插值表。
每个元素表示与矢量中的温度相关的效率 Temperature . 向量的长度必须等于向量的长度 Temperature . 向量的每个元素都必须在范围内 (0,1].
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
#
Temperature —
温度
K | degC | degF | degR | deltaK | deltadegC | deltadegF | deltadegR
Details
用于构造温度与效率对应关系的一维插值表的温度向量。 向量的元素应该从左到右增加。
依赖关系
若要使用此参数,请为参数设置 Friction model 意义 Temperature-dependent efficiency.
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
基本参数
# Ring (R) to large sun (SL) teeth ratio (NR/NSL) — 冠齿轮与大太阳齿轮的传动比
Details
齿轮比 冠齿轮到太阳齿轮,由冠齿轮的齿数与大太阳齿轮的齿数之比确定。
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
# Ring (R) to small sun (SS) teeth ratio (NR/NSS) — 冠齿轮和小太阳齿轮的传动比
Details
齿轮比 冠齿轮的齿数与小太阳齿轮的齿数之比,由冠齿轮的齿数与小太阳齿轮的齿数之比确定。 该传动比必须严格大于 Ring (R) to large sun (SL) teeth ratio (NR/NSL) .
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |
粘性损耗
#
Large sun-carrier, small sun-carrier, large sun planet-carrier and small sun planet-carrier viscous friction coefficients —
齿轮的粘性摩擦
N*m*s/rad | mN*m*s/rad | kN*m*s/rad | kgf*m*s/rad | lbf*ft*s/rad
Details
粘性摩擦系数矢量 于大太阳、小太阳、大太阳卫星和小太阳卫星齿轮分别相对于驱动器的运动。
| 计量单位 |
|
| 默认值 |
|
| 程序使用名称 |
|
| 可计算 |
是 |