Arduino-encoderRead
| The block is supported on STM32 boards. |
Output of the number of ticks of the quadrature encoder.
blockType: CFunction
|
Path in the library: |
Description
| To work with the block, install/update the support package. equipment. |
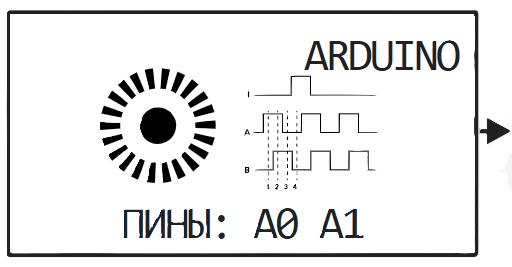
Block Arduino-encoderRead outputs the number of ticks (pulses) of a quadrature encoder on a rotating motor connected to the board.
Ports
Output
#
value
—
the number of ticks relative to the initial position
scalar
Details
| Data types |
|
| Complex numbers support |
No |
Parameters
Main group
# Первый номер канала таймера — pin of the card on which the encoder signal A is output
Details
| Default value |
|
| Program usage name |
|
| Tunable |
No |
| Evaluatable |
Yes |
# Второй номер канала таймера — pin of the board on which the encoder signal B is output
Details
| Default value |
|
| Program usage name |
|
| Tunable |
No |
| Evaluatable |
Yes |
# Число тиков за оборот — the number of ticks per full rotation of the encoder
Details
The number of ticks per full rotation of the encoder with the initial position 0. Clockwise rotation will increase the output signal of the unit by 1 before T/2 (when rotating by half of a full turn), counterclockwise rotation will reduce the output signal of the unit by 1 before −T/2 (when turning half of a full turn).
| Default value |
|
| Program usage name |
|
| Tunable |
No |
| Evaluatable |
Yes |
# Размер шага — the period from which the block will be called
Details
Specify the interval between the calculation steps as a non-negative number. To inherit the calculation step, set this parameter to −1.
| Default value |
|
| Program usage name |
|
| Tunable |
No |
| Evaluatable |
Yes |