Relativistic addition of velocities on Julia
In the special theory of relativity, the addition of velocities is nonlinear and is described by the formula:
You can represent speeds as quaternions and implement this addition in Julia.
Unlike the usual vector operations, the quaternion formalism:
-
Automatically takes into account relativistic effects — the nonlinearity of the addition of velocities arises naturally from the algebraic properties of quaternions, excluding the possibility of "mechanical" addition, prohibited by the special theory of relativity.
-
Ensures geometric integrity — operations with quaternions maintain invariance with respect to rotations of the reference system, which is critically important for problems of astrophysics and quantum mechanics.
-
Simplifies calculations — one quaternion operation replaces a series of Lorentz matrix transformations, reducing the amount of calculations in complex systems (for example, when modeling the motion of relativistic particles in accelerators).
The Quaternions.jl library
The addition of relativistic velocities using quaternions can be performed using a specialized library for working with these objects.
Pkg.add("Quaternions")
Consider a speculative problem where you move relative to an observer at 60% of the speed of light and fire a shot along the axis of motion, with the projectile or bullet moving relative to you at 40% of the speed of light.
We know that the velocity of the projectile relative to the original observer cannot exceed the speed of light, but it will approach it.
using Quaternions
# The velocities are represented as quaternions (scalar part = 0)
function relativistic_velocity_addition(u, v, c=1.0)
uv = -((u * v).s) # the quaternion product
γ = 1 / (1 + uv / c^2) # The relativistic factor
return γ * (u + v)
end
# Example: two speeds along the X-axis
u = quat(0, 0.6, 0, 0) # 0.6c
v = quat(0, 0.4, 0, 0) # 0.4c
u_plus_v = relativistic_velocity_addition(u, v)
println("The resulting speed: ", [u_plus_v.v1, u_plus_v.v2, u_plus_v.v3] )
The result ≈0.806c is the correct relativistic sum for 0.6c+ 0.4C.
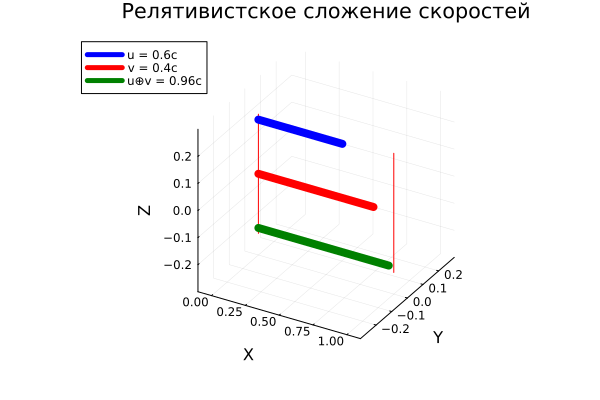
Visualization of the relativistic addition of velocities
At the end of this example, we will create an interactive diagram that can be controlled using convenient sliders. For the sake of speed, we use the backend gr().
gr()
# Functions for working with quaternions
scalar_part(q) = q.s
vector_part(q) = [q.v1, q.v2, q.v3]
# Relativistic addition of velocities
function relativistic_velocity_addition(u, v, c=1.0)
uv = -((u * v).s) # the quaternion product
γ = 1 / (1 + uv / c^2) # The relativistic factor
return γ * (u + v)
end
# Sliders for speed control
# @markdown The velocities of both bodies (in fractions of c)
blue_slider = 0.62 # @param {type:"slider",min:0,max:0.99,step:0.01}
red_slider = 0.85 # @param {type:"slider",min:0,max:0.99,step:0.01}
# Creating a shape
u = quat(0, blue_slider[], 0, 0)
v = quat(0, red_slider[], 0, 0)
result = relativistic_velocity_addition(u, v)
# Creating a 3D graph
Plots.plot(title="Relativistic addition of velocities",
xlims=(-0.1, 1.1), ylims=(-0.3, 0.3), zlims=(-0.3, 0.3),
xlabel="X", ylabel="Y", zlabel="Z",
legend=:topleft)
# Drawing vectors
Plots.plot!( [0,0], [0,0], [-0.22,0.22], c=:red, label=false )
Plots.plot!( [1,1], [0,0], [-0.22,0.22], c=:red, label=false )
Plots.plot!([0,vector_part(u)[1]], [0,vector_part(u)[2]], [0.2,0.2+vector_part(u)[3]],
color=:blue, label="u = 0.6c", lw=8)
Plots.plot!([0,vector_part(v)[1]], [0,vector_part(v)[2]], [0,vector_part(v)[3]], color=:red, label="v = 0.4c", lw=8)
Plots.plot!([0,vector_part(result)[1]], [0,vector_part(result)[2]], [-0.2,-0.2+vector_part(result)[3]],
color=:green, label="u⊕v = $(round(vector_part(result)[1], digits=2))c", lw=8)
# Display Settings
Plots.plot!(camera=(30, 30)) # Viewing angle
Conclusion
The use of quaternions for relativistic addition of velocities is not just a mathematical abstraction, but a powerful tool that preserves the physical essence of phenomena.
Quaternions are especially valuable in tasks where the relationship between orientation and motion is important, from spacecraft navigation to computed tomography. Their use ensures that the calculation results are not only mathematically correct, but also physically meaningful, which makes quaternions an indispensable tool of modern science.