Discrete State-Space
Implements a discrete system in the state space.
blockType: DiscreteStateSpace
|
Path in the library: |

Description
Block behavior for nonempty matrices
Block Discrete State-Space implements a system described by the following equations:
where
-
— entrance;
-
— condition;
-
— exit.
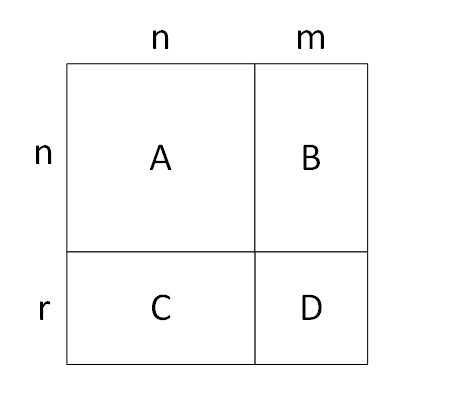
The coefficients of the matrix should have the following characteristics, as shown in the diagram:
-
A It must be a matrix of size on , where — the number of states.
-
B It must be a matrix of size on , where — the number of input parameters.
-
C It must be a matrix of size on , where — the number of exits.
-
D It must be a matrix of size on .
The block accepts one input and generates one output. The length of the input vector is the number of columns in the matrices. B and D. The length of the output vector is the number of rows in the matrices. C and D. To set the initial state vector, use the Initial conditions parameter.
To set a vector or a matrix of zeros for A, B, C, D, or Initial conditions, use the zeros function.
Ports
Input
#
IN_1
—
input signal
scalar | vector | matrix-column
Details
An input vector whose length is equal to the number of columns in the matrices B and D.
| Data types |
|
| Complex numbers support |
No |
Output
#
OUT_1
—
output signal
scalar | vector
Details
Output vector whose length is equal to the number of rows in the matrices C and D.
| Data types |
|
| Complex numbers support |
No |
Parameters
Main
# A — matrix A
Details
matrix coefficient A of size to , where is the number of states.
| Default value |
|
| Program usage name |
|
| Tunable |
Yes |
| Evaluatable |
Yes |
# B — matrix B
Details
matrix coefficient B of size to , where is the number of input parameters.
| Default value |
|
| Program usage name |
|
| Tunable |
Yes |
| Evaluatable |
Yes |
# C — matrix C
Details
matrix coefficient C of size to , where is the number of outputs.
| Default value |
|
| Program usage name |
|
| Tunable |
Yes |
| Evaluatable |
Yes |
#
D —
matrix D
Scalar / array of real numbers
Details
Matrix coefficient D of size to , where is the number of outputs and is the number of input parameters.
| Default value |
|
| Program usage name |
|
| Tunable |
Yes |
| Evaluatable |
Yes |
#
Initial conditions —
initial state vector
Scalar / vector of real numbers
Details
Specify the initial state vector.
| Default value |
|
| Program usage name |
|
| Tunable |
Yes |
| Evaluatable |
Yes |
#
Sample time —
interval between calculation steps
SampleTime (real number / vector of two real numbers)
Details
Specify the interval between calculation steps as a non-negative number. To inherit a calculation step, set this parameter to -1.
| Default value |
|
| Program usage name |
|
| Tunable |
No |
| Evaluatable |
Yes |