Model
The model is a reference for creating a hierarchy of models.
blockType: ModelReference
|
Path in the library: |

Description
Block Model refers to the specified model (the reference model). It displays the input and output ports corresponding to the top-level input and output ports of the reference model. These ports allow you to connect the reference model to other blocks of the parent model (block Model).
In the block Model A representation of the link model content is displayed. To view its contents, double-click the block Model.
Properties of the input ports (block In1) link models are not inherited from the parent model, but are extracted from the input ports of the link model itself. A mismatch between the properties of the inputs of the reference model and the parent model will result in an error. Therefore, manual parameter settings are required for each input port of the reference model.
To open the properties of the input port, double-click on it with the left mouse button.:
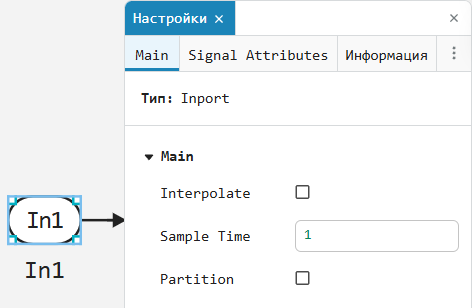
Therefore, for each input port of the reference model, you must manually specify:
-
Sample Time (sampling period), Main tab;
-
Output data type (data type), Signal Attributes tab;
-
Port dimensions (port dimension), Signal Attributes tab;
-
Signal type (signal type), the Signal Attributes tab.
|
To display information about some attributes of the signals in the model, open Settings |
|
Ports
Entrance
Port_1 — input of the pass model:q[<br>] scalar | vector | the matrix | array | the tire
Block Model It has an input port for each input port of the reference model. Each input port of the block Model — this is the top-level input of the link model.
Block input port name Model matches the name of the corresponding input port of the reference model.
The input port can read duplicated ports of the reference model (for example, using the block In1):
Output
Port_2 — output of the pass model:q[<br>] scalar | vector | the matrix | array | the tire
Block Model It has an output port for each output port of the reference model. Each output port of the block Model — this is the top-level output of the link model, for example, the output through the block Out1.
The name of the output port in the block Model matches the name of the corresponding output port of the reference model.
Parameters
Main
Select a model — file name of the model-link
there is no default
Specify the file name of the link model. To select a reference model, click Select Model in the block settings menu and select the model by its name. To view the specified model, click on the path to the selected model in the same menu or double-click on the block. Model.
Update connectors — updates the input/output ports of the pass model:q[<br>] there is no default
Update the block’s input/output ports Model after making changes to the reference model. To make the changes appear in the block Model, save the reference model first.