Optimization
In this example, we will demonstrate the solution of several simple optimization problems: finding the minimum of a two-parameter function using a package Optim, an explicit implementation of gradient descent and the search for an optimal solution with constraints in a linear programming problem.
Let's make a preparatory cell for loading libraries.
Pkg.add(["GLPK", "LinearAlgebra", "StatsBase", "JuMP", "Optim"])
# Download the necessary libraries
using Plots
plotlyjs()
Optimization of the function of several variables
http://julianlsolvers.github.io/Optim.jl/v0.9.3/user/minimization/
Find the minimum of the function using the library Optim.
Specify the starting point .
using Optim
f_optim(x) = (1.0 - x[1])^2 + 100.0 * (x[2] - x[1]^2)^2
results_auto = Optim.optimize(f_optim, [0.0, 0.0])
print(results_auto)
Implementing gradient descent
https://nextjournal.com/DeepLearningNotes/Ch06StochasticGradientDescent
The objective of this exercise is to implement a linear regression procedure through gradient descent. First, run the preparation cell.
using Plots, LinearAlgebra, StatsBase
The input data for this task is created in the following cell.
regX = rand(100)
regY = 50 .+ 100 * regX + 2 * randn(100);
scatter( regX, regY, fmt = :png, legend=:bottomright, label="data" )
The exact solution to this problem can be expressed as follows.
ϕ = hcat(regX.^0, regX.^1);
δ = 0.01;
θ = inv(ϕ'ϕ + δ^2*I)*ϕ'regY;
Let's define a quadratic loss function and calculate the gradient. After this function, we can draw a graph of the optimization function, but we will draw it at the very end of the exercise.
function loss(X,y,θ)
cost = (y .- X*θ)'*(y .- X*θ);
grad = - 2 * X'y + 2*X'X*θ;
return (cost, grad)
end
function sgd(loss, X, y, θ_start, η, n, num_iters)
#=
List of arguments:
loss is a function that we optimize.,
it accepts dataset (X, y) and
the current set of parameters;
the function should return
loss value and gradient when setting parameters
theta0 -- initial estimate of the parameter vector θ
nn -- learning rate
n -- batch size
num_iters -- max.number of SGD runs
Returns:
theta -- vector of parameters at the end of SGD
path -- estimates of the optimal θ at each learning step
=#
data = [(X[i,:],y[i]) for i in 1:length(y)]
θ = θ_start
path = θ
for iter in 1:num_iters
s = StatsBase.sample(data, n)
Xs = hcat(first.(s)...)'
ys = last.(s)
cost, grad = loss(Xs,ys,θ)
θ = θ .- ( ( η * num_iters/(num_iters+iter) * grad) / n )
path = hcat(path,θ)
end
return (θ,path)
end
Graph output with optimization progress:
# The surface of the loss function
xr = range(40, stop=60, length=10);
yr = range(90, stop=110, length=10);
X = hcat(ones(length(regX)), regX);
f(x,y) = loss(X,regY,[x y]')[1][1];
plot(xr, yr, f, st=:wireframe, fmt = :png, label="Loss function", color="blue")
# Optimization paths
X = hcat(ones(length(regX)), regX);
y = regY;
(t,p) = sgd(loss, X, y, [40 90]', 0.1, 1, 500);
scatter!( p[1,:], p[2,:], f.(p[1,:],p[2,:]),
label="The optimization path", ms=3, markerstrokecolor = "white", camera=(40,30) )
Let's display the optimization results:
println("Coordinates of the found point where the function takes the minimum value:")
print( p[:,end] )
Finding the optimal solution with constraints
Suppose we are faced with such an optimization problem:
The range of acceptable values is shown in the figure (x and y are continuous, independent variables):
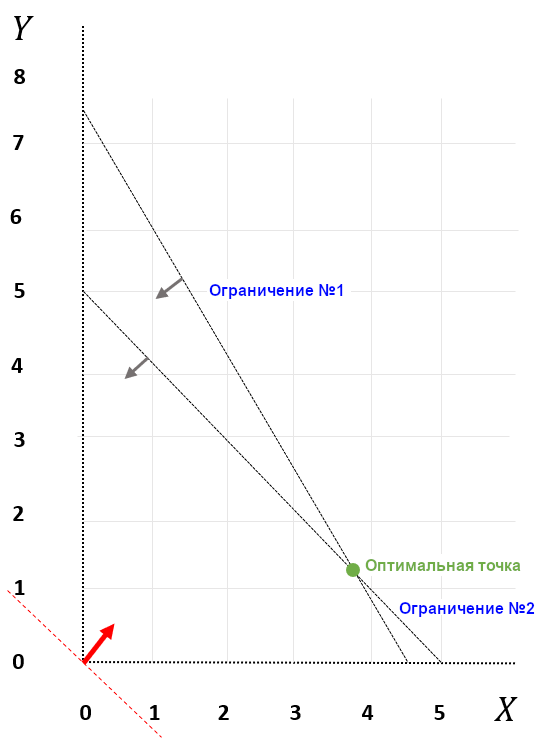
We are given an optimization objective (red arrow) and a direction (maximization), the green dot is the optimal solution, its coordinates are x = 3.75 and y = 1.25. The optimal value of the objective function is 23.75.
Let's solve this problem using the JuMP library Julia for optimization.
using JuMP, GLPK
# Setting the model
m = Model(); # m will mean "model"
# Let's choose an optimizer
set_optimizer(m, GLPK.Optimizer); # let's choose the GLPK solver (GNU Linear Programming Kit)
# Define
@variable(m, x>=0);
@variable(m, y>=0);
# Define the restrictions
@constraint(m, x+y<=5);
@constraint(m, 10x+6y<=45);
# Let's define the objective function
@objective(m, Max, 5x+4y);
# Let's launch the solver
optimize!(m);
# Conclusion
println(objective_value(m)) # The value of the objective function at the optimal point
println("x = ", value.(x), "\n","y = ",value.(y)) # Optimal x and y coordinates