corrmtx
A data matrix for estimating the autocorrelation matrix.
| Library |
|
Arguments
Input arguments
# m is the order of the prediction model
+
a positive real integer
Details
The order of the prediction model, given as a positive real integer.
# method — matrix calculation method
+
"autocorrelation" (by default) | "prewindowed" | "postwindowed" | "covariance" | "modified"
Details
The matrix calculation method specified by one of the following values:
-
"autocorrelation"(by default)H— this is a rectangular matrix Greenhouse in size(n+m)×(m+1), which generates an autocorrelation estimate for the data vectorxlengthnobtained using data before and after windowing based on the prediction modelm- th order. The matrix can be used to estimate the parameters of an autoregressive model using the Yule method. — Walker. For more information, seearyule. -
"prewindowed" -
"postwindowed" -
"covariance"H— this is a rectangular matrix of Greenhouse size(n−m)×(m+1), which generates an autocorrelation estimate for the data vectorxlengthnobtained using non-window data based on the prediction modelm- th order. The matrix can be used to perform autoregressive parameter estimation using the covariance method. For more information, seearcov. -
"modified"H— this is a modified rectangular matrix Greenhouse size2(n−m)×(m+1), which generates an autocorrelation estimate for the data vectorxlengthnobtained using estimates of forward and backward prediction errors based on the prediction modelm- th order. The matrix can be used to perform autoregressive parameter estimation using a modified covariance method. For more information, seearcovandarmcov.
Examples
Modified data and autocorrelation matrices
Details
We will generate a signal consisting of three complex exponential functions, to which white Gaussian noise is added. Let’s calculate the data matrices and autocorrelations using a modified method.
import EngeeDSP.Functions: corrmtx, randn
n = 0:99
s = exp.(im * pi/2 .* n)' + 2 .* exp.(im * pi/4 .* n)' + exp.(im * pi/3 .* n)' + randn(1, 100)
m = 12
X,R = corrmtx(s,m,"modified")Let’s plot the real and imaginary parts of the autocorrelation matrix.
A = repeat(1:m+1, 1, m+1)
B = repeat((1:m+1)', m+1, 1)
p1 = plot(A, B, real(R), st=:surface, title="Re(R)")
p2 = plot(A, B, imag(R), st=:surface, title="Im(R)")
plot(p1, p2, layout=(2,1))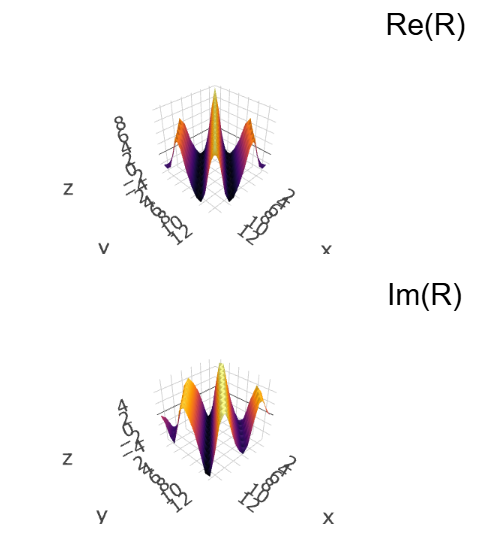
Algorithms
The Greenhouse data matrix calculated using the function corrmtx, depends on the chosen method. The matrix determined by the autocorrelation method (by default) has the form:
In the matrix — the value of the input argument m, and — length of the input vector x. Variations of this matrix are used for the output argument H for each method:
-
"autocorrelation"(by default) —H. -
"prewindowed"—Hthe submatrix size , the first line of which is — , and the last line — . -
"postwindowed"—Hthe submatrix size , the first line of which is — , and the last line — . -
"covariance"—Hthe submatrix size , the first line of which is — , and the last line — multiplied by . -
"covariance"—Hthe matrix size , defined as follows: