Search for key points using the ORB detector
The ORB detector is used for video stabilization, panorama creation, object detection, 3D reconstruction, camera motion estimation, image alignment, and localization for augmented reality. It is also used to recognize locations such as buildings or landmarks through a database of key points.
The theoretical part
ORB (Oriented FAST and Rotated BRIEF) is a fast keyword detector and descriptor. It combines the FAST algorithms (for detecting key points) and BRIEF (for describing them).
The FAST (Features from Accelerated Segment Test) algorithm is used to find corners in an image.
The Harris Corner Measure ** is used to select the most significant points, which reduces the number of weak key points. The orientation is calculated for each key point.
This makes the ORB invariant to image rotations.
Algorithm BRIEF (Binary Robust Independent Elementary Features) creates binary descriptors. To compare points between images, ORB uses a pairwise comparison of binary descriptors with the Hamming metric.
In this example, we will consider the classic use of the ORB detector to find key points in two images and compare them. Based on the calculated homography, the images will be aligned and combined, resulting in a panorama showing the process of combining two images into a single image.
We connect the necessary packages for working with images
import Pkg;
Pkg.add("Images")
Pkg.add("ImageFeatures")
Pkg.add("ImageDraw")
Pkg.add("ImageProjectiveGeometry")
Pkg.add("LinearAlgebra")
Pkg.add("OffsetArrays")
Pkg.add("ImageTransformations")
Pkg.add("StaticArrays");
using Pkg, Images, ImageFeatures, ImageDraw
using ImageProjectiveGeometry
using LinearAlgebra, OffsetArrays
using ImageTransformations, StaticArrays
Uploading Images
We specify the path to the images, upload and display them:
path_to_img_1 = "$(@__DIR__)/1.jpg"
path_to_img_2 = "$(@__DIR__)/2.jpg"
Image_1 = load(path_to_img_1)
Image_2 = load(path_to_img_2)

Application of ORB
Initializing the descriptor
orb_params = ORB(num_keypoints = 1000);
Let's define a function that uses a descriptor to search for key points in an image.
function find_features(img::AbstractArray, orb_params)
desc, ret_features = create_descriptor(Gray.(img), orb_params)
end;
Let's define a function that searches for common key points in two images. First, the key points and descriptors for each image are calculated, then the descriptors are matched using a specified threshold.
function match_points(img1::AbstractArray, img2::AbstractArray, orb_params, threshold::Float64=0.1)
desc_1, ret_features_1 = find_features(img1, orb_params)
desc_2, ret_features_2 = find_features(img2, orb_params)
matches = match_keypoints(ret_features_1, ret_features_2, desc_1, desc_2, threshold);
end;
Find matching key points
matches = match_points(Image_1, Image_2, orb_params, 0.35);
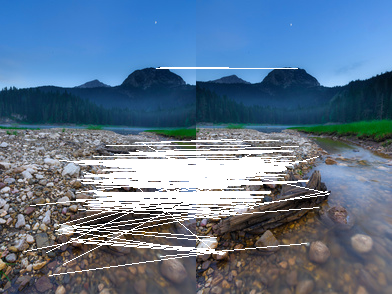
Let's define a function that visualizes the relationship of key points. Function pad_display places images side by side, horizontally on the same canvas. draw_matches draws lines that connect common key points.
function pad_display(img1, img2)
img1h = length(axes(img1, 1))
img2h = length(axes(img2, 1))
mx = max(img1h, img2h);
hcat(vcat(img1, zeros(RGB{Float64},
max(0, mx - img1h), length(axes(img1, 2)))),
vcat(img2, zeros(RGB{Float64},
max(0, mx - img2h), length(axes(img2, 2)))))
end
function draw_matches(img1, img2, matches)
grid = pad_display(parent(img1), parent(img2));
offset = CartesianIndex(0, size(img1, 2));
for m in matches
draw!(grid, LineSegment(m[1], m[2] + offset))
end
grid
end;
Let's see what we have at the exit.
draw_matches(Image_1, Image_2, matches)
Building a panorama
To calculate the homography (geometric transformation), the coordinates of the points that correspond to each other in the two images are required.
Here from the list of matched key points matches the coordinates of the points for the two images are extracted. x1 — these are the coordinates from the first image, x2 — from the second one.
x1 = hcat([Float64[m[1].I[1], m[1].I[2]] for m in matches]...) # 2xN
x2 = hcat([Float64[m[2].I[1], m[2].I[2]] for m in matches]...); # 2xN
Here the RANSAC method is used to find the homography matrix H, which aligns the two groups of points as precisely as possible x1 and x2.
t = 0.01
# Calculating homography using RANSAC
H, inliers = ransacfithomography(x1, x2, t);
t - this is the threshold that determines how much the points can differ after applying homography in order to be considered "correct" (inlayers).
Structure Homography to represent the homography matrix. It contains a 3x3 matrix that defines the transformation between two images.
struct Homography{T}
m::SMatrix{3, 3, T, 9}
end
Homography(m::AbstractMatrix{T}) where {T} = Homography{T}(SMatrix{3, 3, T, 9}(m))
function (trans::Homography{M})(x::SVector{3}) where M
out = trans.m * x
out = out / out[end]
SVector{2}(out[1:2])
end
function (trans::Homography{M})(x::SVector{2}) where M
trans(SVector{3}([x[1], x[2], 1.0]))
end
function (trans::Homography{M})(x::CartesianIndex{2}) where M
trans(SVector{3}([collect(x.I)..., 1]))
end
function (trans::Homography{M})(x::Tuple{Int, Int}) where M
trans(CartesianIndex(x))
end
function (trans::Homography{M})(x::Array{CartesianIndex{2}, 1}) where M
CartesianIndex{2}.([tuple(y...) for y in trunc.(Int, collect.(trans.(x)))])
end
function Base.inv(trans::Homography{M}) where M
i = inv(trans.m)
Homography(i ./ i[end])
end
The function is used warp to apply the homography matrix H to the image Image_1, creating a transformed image new_img.
new_img = warp(Image_1, Homography(H))

The function combines two images — the original and the transformed — into one common canvas, where a new image is added on top of the old one.
function merge_images(img1, new_img)
# Calculating the canvas size
axis1_size = max(last(axes(new_img, 1)), size(img1, 1)) - min(first(axes(new_img, 1)), 1) + 1
axis2_size = max(last(axes(new_img, 2)), size(img1, 2)) - min(first(axes(new_img, 2)), 1) + 1
# Creating an OffsetArray for the combined image
combined_image = OffsetArray(
zeros(RGB{N0f8}, axis1_size, axis2_size), (
min(0, first(axes(new_img, 1))),
min(0, first(axes(new_img, 2)))))
# Copy the first image to the shared canvas
combined_image[1:size(img1, 1), 1:size(img1, 2)] .= img1
# Copy the second image to the shared canvas
for i in axes(new_img, 1)
for j in axes(new_img, 2)
if new_img[i, j] != colorant"black" # Skip the black pixels
combined_image[i, j] = new_img[i, j]
end
end
end
combined_image
end
panorama = merge_images(Image_1, new_img)
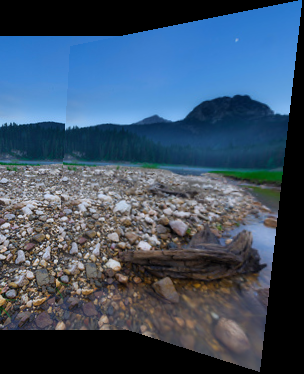
Conclusions
The example demonstrated the use of the ORB detector to automatically find key points and match them on two images. The constructed homography made it possible to align the images, and combining them made it possible to create a panorama.