grpdelay
Average filter delay (group delay).
| Library |
|
Syntax
Function call
-
gd,w = grpdelay(b,a,n)— returns the characteristic of the group delay time of the specified digital filter. Specify a digital filter with numerator coefficientsband the coefficients of the denominatora. The function returnsn-the point vector of the frequency response of the group delay in the output argumentgdand the corresponding vector of angular frequenciesw.
-
grpdelay(___,out=:plot)— plots the characteristics of the group delay time of the filter.
Arguments
Input arguments
# b,a are the coefficients of the transfer function
+
vectors
Details
The coefficients of the transfer function, set as vectors. The transfer function is expressed in terms of b and a as follows:
| Data types |
|
| Support for complex numbers |
Yes |
# n is the number of frequency points by which the characteristic is evaluated
+
512 (by default) | a positive integer
Details
The number of frequency points by which the characteristic is evaluated, set as a positive integer of at least 2. If the argument is n not specified, the default value is 512. For best results, set for the argument n a value exceeding the filter order.
# B,A are the coefficients of the cascade transfer function
+
scalars | vectors | matrices
Details
The coefficients of the cascade transfer function, specified as scalars, vectors, or matrices. In matrices B and A The coefficients of the numerator and denominator of the cascade transfer function are listed, respectively.
The matrix B must have a size of on , and the matrix A — on , where
-
— number of filter sections;
-
— the order of the numerators of the filter;
-
— the order of the denominators of the filter.
For more information about the cascade transfer function format and coefficient matrices, see Setting digital filters in CTF format.
If any element of the matrix A[:,1] not equal to 1, then the function grpdelay normalizes the filter coefficients by A[:,1]. In this case A[:,1] it must be non-zero.
|
| Data types |
|
| Support for complex numbers |
Yes |
# g — scale factors
+
scalar | vector
Details
Scale coefficients defined as a real scalar or vector with real values containing the element where — the number of sections of the cascade transfer function. The scale factors represent the distribution of the filter gain across the sections of the cascade filter representation.
Function grpdelay applies the gain to the filter sections using the function scaleFilterSections depending on the way the argument is set g:
-
scalar— the function evenly distributes the gain across all sections of the filter; -
vector— the function applies the first applies the gain values to the corresponding filter sections and distributes the last gain value evenly across all filter sections.
| Data types |
|
# sos — coefficients of the sections of the second order
+
the matrix
Details
Coefficients of the second-order sections, specified as a matrix. Argument sos — this is a matrix of size on , where is the number of sections must be greater than or equal to 2. If the number of sections is less 2, the function processes the input data as a vector of numerators. Each line sos corresponds to the coefficients of the second-order filter (biquadrate filter); - I’m a string sos respond [bi[1] bi[2] bi[3] ai[1] ai[2] ai[3]].
| Data types |
|
| Support for complex numbers |
Yes |
#
fs —
sampling
rate
scalar
Details
The sampling rate, set as a positive scalar. If the unit of time is seconds, then fs expressed in Hz.
| Data types |
|
Name-value input arguments
Specify optional argument pairs as Name=Value, where Name — the name of the argument, and Value — the appropriate value.
# out — type of output data
+
:data (by default) | :plot
Details
Type of output data:
-
:data— the function returns data; -
:plot— the function returns a graph.
Output arguments
# gd — characteristic of the group delay time
+
vector
Details
The characteristic of the group delay time returned as a vector. If the argument is n if set, then the vector gd has a length of n. If n if it is not specified or set as an empty vector, then the length of the vector is gd equal to 512.
If the input data of the function is grpdelay have single precision, the function calculates the group delay using single precision arithmetic. Output argument gd it has a single precision.
# w — angular frequencies
+
vector
Details
The angular frequencies returned as a vector. The value of the argument w varies from 0 before . If an argument is given as input "whole", then the values in the vector w will vary from 0 before . If an argument is given n, vector w has a length of n. If n if it is not specified or set as an empty vector, then the length of the vector is w equal to 512.
# f — frequencies
+
vector
Details
Frequencies returned as a vector and expressed in Hz. Argument f accepts values from 0 before fs/2 Hz. If an argument is given as input "whole", then the values in the vector are f will be in the range of 0 before fs Hz. If an argument is given n, vector f has a length of n. If n if it is not specified or set as an empty vector, then the length of the vector is f equal to 512.
Examples
Butterworth Filter Group Delay
Details
Let’s design a 6th-order Butterworth filter with a normalized 3 dB frequency rad/countdown. Using the function grpdelay to display the group delay.
import EngeeDSP.Functions: butter, zp2sos, grpdelay
z, p, k = butter(6, 0.2, out = 3)
sos = zp2sos(z, p, k)
grpdelay(sos, 128, out = :plot)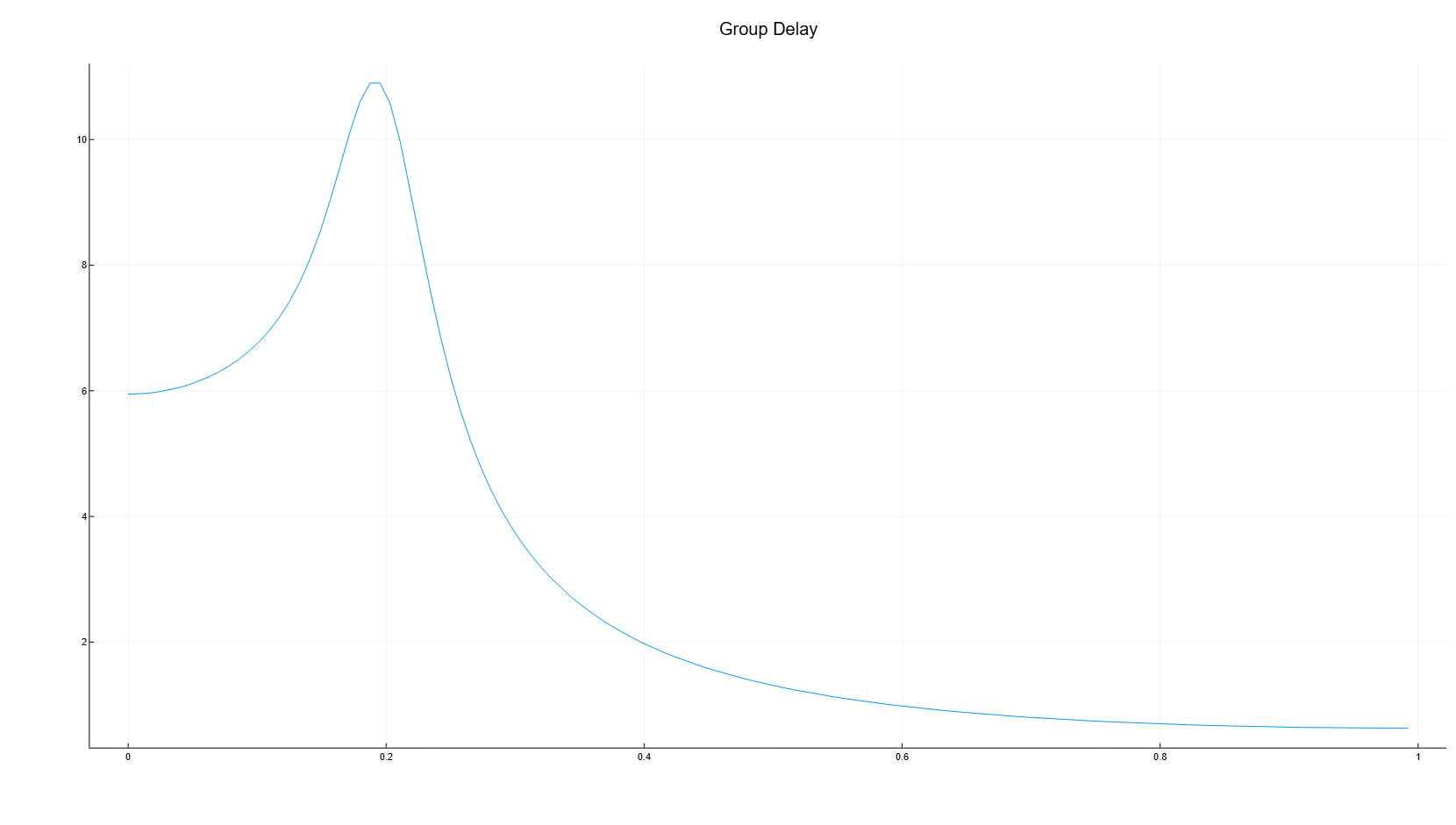
We will display the group delay and the phase delay of the system on one graph.
import EngeeDSP.Functions: freqz, unwrap
gd = grpdelay(sos, 512)
h, w = freqz(sos, 512)
pd = -unwrap(angle(h))./w
plot(w/π, real.(gd[1]), label = "Group delay",
xlabel = "Normalized Frequency (×π rad/sample)",
ylabel = "Group and phase delays")
plot!(w/π, pd, label = "Phase delay")
Additional Info
Group delay
Details
The characteristic of the group delay time_ is a measure of the average filter delay as a function of frequency. It is the first derivative of the phase characteristic of the filter taken with the opposite sign. If the frequency response of the filter is , then the group delay is
where — phase, or argument, .
Cascading transfer functions
Details
Splitting a digital IIR filter into cascaded sections increases its numerical stability and reduces its susceptibility to coefficient quantization errors. Cascade form of the transfer function expressed in terms of transfer functions , has the form

Setting digital filters in CTF format
Details
Digital filters can be designed in CTF format to analyze, visualize, and filter signals. The filter is set by enumerating its coefficients B and A. You can also specify the scaling factor of the filter by sections by setting a scalar or vector value. g.
coeffects of the filter
When setting coefficients in the form -lowercase matrices
it is assumed that the filter is set as a sequence of cascade transfer functions, so that the complete transfer function of the filter has the form
where — the order of the filter numerator, and — the order of the denominator.
-
If and defined as vectors, it is assumed that the basic system is a single-section IIR filter ( ), where represents the numerator of the transfer function, and — its denominator.
-
If — scalar, it is assumed that the filter is a cascade of all-pole IIR filters, and the total system gain of each cascade is equal to .
-
If — scalar, it is assumed that the filter is a cascade of FIR filters, and the total gain of the system of each cascade is equal to .
|
coeffects and amplification
If there is a common scale gain or several scale gain factors that are outside the values of the filter coefficients, you can specify the coefficients and gain as a tuple. (B, A, g). Scaling the filter sections is especially important when working with fixed-point arithmetic to ensure that the output signals of each filter section have similar amplitude levels, which helps to avoid inaccuracies in the frequency response of the filter due to limited computational accuracy.
The gain can be a scalar total gain or a vector of section gain coefficients.
-
If the gain is scalar, its value is applied uniformly to all sections of the cascade filter.
-
If the gain is a vector, it must contain one element more than the number of filter sections. in the cascade. Each of the first The scale coefficients are applied to the corresponding filter section, and the last value is applied evenly to all sections of the cascade filter.
If you specify the filter coefficient matrices and the gain coefficient vector as
it is assumed that the transfer function of the filter system has the form