Solving a system of differential equations under various initial conditions
In this example, we consider two approaches to solving a differential equation under different initial conditions: 1.
using a loop for with the change of n.o.
2. using EnsembleProblem for multithreaded solutions
Task description
As a test, consider the [Lotka-Volterra] equation (https://ru.wikipedia.org/wiki/Model_lotki_—_Volterra), describing the predator-prey model:
where
and - populations of prey and predator, respectively
- time
- constant parameters describing the interaction between representatives of the species.
For the sake of certainty, let's take them as equal .
In the given task, the n.o. is the size of the species population. By solving the problem, we will be able to observe the population change over time.
Let's look at which packages are needed to solve our problem.:
OrdinaryDiffEq- a package that allows you to solve ordinary problems, which can work without connecting the packageDifferentialEquationsPlotsIt has the ability to display the solution of a differential equation in just one line.Distributedallows you to place functions on different processor cores to increase computing efficiency.
Pkg.add(["DifferentialEquations", "OrdinaryDiffEq", "Distributed", "BenchmarkTools"])
using OrdinaryDiffEq, Plots
An ordinary d.u. has the form
To solve the problem, it is necessary to determine the following initial data:
f - the function itself (the structure of the device)
u0 - initial conditions
tspan - the time period during which a solution is sought
p - system parameters that also determine its appearance
kwargs - keywords passed to the solution
There are two ways to set the function f:
f(du,u,p,t)- memory-efficient, but may not be supported by [packages](https://fluxml.ai/Zygote .jl/dev/limitations/#Array-mutation-1), in which [mutation] is prohibited(https://docs.julialang.org/en/v1/manual/variables/#man-assignment-expressions )f(u,p,t)- returnsdu. Applicable in packages where mutation is prohibited.
function lotka(du, u, p, t)
du[1] = p[1] * u[1] - p[2] * u[1] * u[2]
du[2] = p[4] * u[1] * u[2] - p[3] * u[2]
end
α = 1; β = 0.01; γ = 1; δ = 0.02;
p = [α, β, γ, δ]
tspan = (0.0, 6.5)
u0 = [50; 50]
prob = ODEProblem(lotka, u0, tspan, p)
After we have set the task, we will proceed to its solution. Function solve allows you to solve the problem using various solvers (solver). In our case, we have an ODE that can be solved with a constant step. The set problem and solver will be passed as parameters. Tsit5() and the parameter saveat=0.01, indicating to the function the step with which to save the solution.
sol = solve(prob, Tsit5(), saveat=0.01)
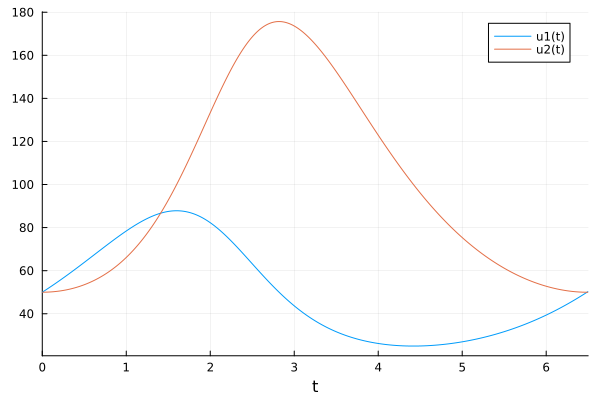
Now let's display our solution, with the legend and axis caption automatically specified. t
plot(sol)
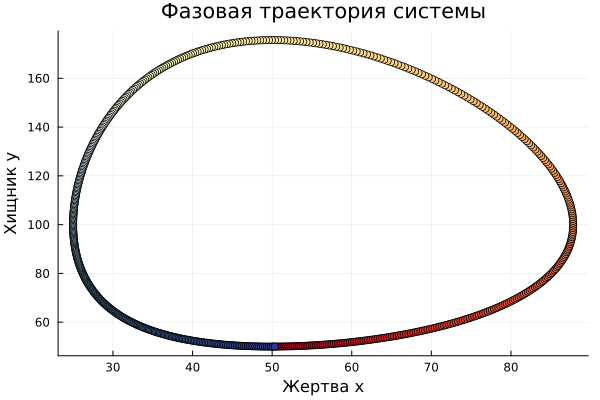
Now let's display the phase trajectory - the change in phase coordinates (x and y) from time to time. In the figure, the initial positions are in shades of red, and at the end of the solution are blue.
scatter(
sol[1, :], sol[2, :], # x and y
legend=false, marker_z=sol.t, color=:RdYlBu, # marker_z allows you to change the marker color from t
xlabel="Victim x", ylabel="Predator y", # RdYlBu - from Red to Blue through Yellow
title="The phase trajectory of the system")
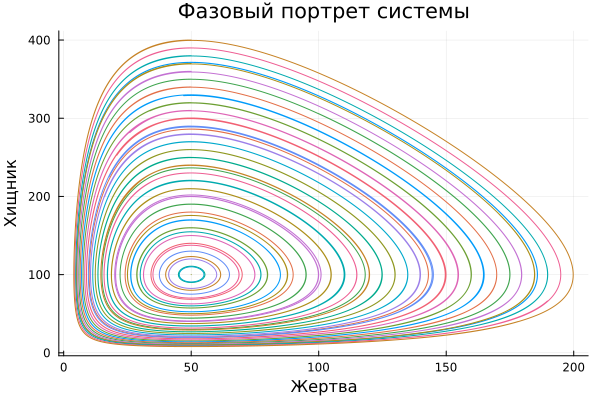
Now that we have been able to depict the phase trajectory for one pair of vehicles, we will build a phase portrait of the totality of these trajectories.
To do this, we will use a loop for gradually increasing the initial size of the predator's population.
tspan=(0., 15.)
initial_conditions = range(10, stop=400, length=40)
plt = plot()
for y0 in initial_conditions
u0 = [50; y0]
prob = ODEProblem(lotka, u0, tspan, p)
sol = solve(prob, Tsit5(), saveat=0.01)
plot!(plt, sol[1, :], sol[2, :], title="Phase portrait of the system", xlabel="Victim", ylabel="Predator" ,legend=false)
end
display(plt)
Multithreaded phase portrait construction
Now let's consider another solution to the problem of constructing a phase portrait. To do this, we will connect the standard package Distributed, which allows you to perform tasks in a distributed manner. And we will distribute our task into 4 threads (processes).
using Distributed
N_PROCS = 4 # setting the number of processes
addprocs(N_PROCS)
By enabling DifferentialEquations - a package for solving various types of problems, we will use the function EnsembleProb, which allows you to set a change in the initial conditions by calling the function prob_func.
For example, you can change the initial conditions randomly.:
function prob_func(prob, i, repeat)
@. prob.u0 = randn() * prob.u0 prob
end
or use an external data container.:
function prob_func(prob, i, repeat)
remake(prob, u0=[50, initial_conditions[i]])
end
using DifferentialEquations
u0 = [50; 10];
prob = ODEProblem(lotka, u0, tspan, p);
function prob_func(prob, i, repeat)
remake(prob, u0=[50, initial_conditions[i]])
end
ensemble_prob = EnsembleProblem(prob, prob_func=prob_func)
Having set the task, we get a solution using solve. But this time, we will get back not just one solution, but a whole set of simulations. sim. Note that in solve added arguments:
EnsembleThreads() - meaning that the distribution will be across processor threads, rather than, for example, across different cluster computers
trajectories=N_TRAJECTS - the number of simulations we want to run
N_TRAJECTS = length(initial_conditions)
sim = solve(ensemble_prob, Tsit5(), EnsembleThreads(), trajectories=N_TRAJECTS, saveat=0.01);
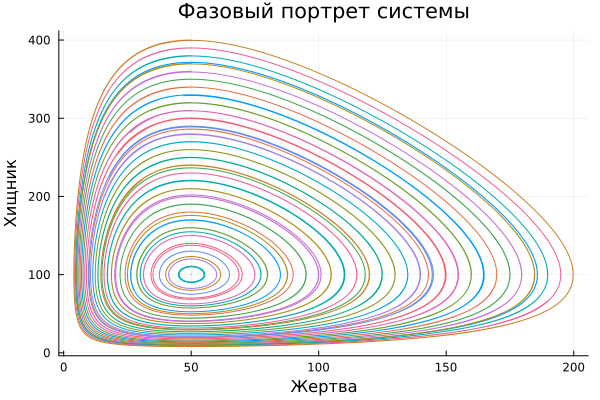
Let's draw a phase portrait, going through each solution in the simulation set.
plt = plot()
for sol in sim.u
plot!(plt, sol[1, :], sol[2, :], title="Phase portrait of the system", xlabel="Victim", ylabel="Predator" ,legend=false)
end
display(plt)
Comparison of execution time
Now let's compare the code execution time in a loop and using multithreading.
To do this, connect the library BenchmarkTools, let's set our functions that we want to compare, and use a macro @btime our functions will be run several times and their average execution time will be calculated.
using BenchmarkTools
function for_loop_solution()
for y0 in range(10, stop=400, length=20)
u0 = [50; y0]
prob = ODEProblem(lotka, u0, tspan, p)
solve(prob, Tsit5(), saveat=0.01)
end
end
function ensemble_prob_solution()
prob = ODEProblem(lotka, u0, tspan, p)
initial_conditions = range(10, stop=400, length=20)
function prob_func(prob, i, repeat)
remake(prob, u0=[50, initial_conditions[i]])
end
ensemble_prob = EnsembleProblem(prob, prob_func=prob_func)
solve(ensemble_prob, Tsit5(), EnsembleThreads(), trajectories=20, saveat=0.01)
end
@btime for_loop_solution()
@btime ensemble_prob_solution()
[]; # a stub to avoid outputting EnsembleProblem to the output cell
Conclusion
Based on the results of the estimated execution time, ensemble_prob_solution it turned out to be 4 times faster, which corresponds to the number of cores allocated for the task.
From which it can be concluded that when solving a system of differential equations with different initial conditions, the cycle for it is worth preferring EnsemleProblem and distributed computing, using the package Distributed.