Modeling the microdopler effect
The example introduces the concept of the microdopler effect and demonstrates the construction of a radar system capable of extracting a microdopler from a reflected signal. This feature can be used in the future to solve the problem of goal classification.
Connecting libraries and functions
let
installed_packages = collect(x.name for (_, x) in Pkg.dependencies() if x.is_direct_dep)
list_packages = ["DSP","FFTW","LinearAlgebra"]
for pack in list_packages
pack in installed_packages || Pkg.add(pack)
end
end
using DSP,FFTW,LinearAlgebra
gr()
default(titlefontsize=12,top_margin=5Plots.px,guidefont=10,
fontfamily = "Computer Modern",colorbar_titlefontsize=8,size=(800,400),
margin = 2Plots.mm
)
function setting_plotlyjs(fig1)
PlotlyJS.relayout!(fig1,title = "Range-Doppler portrait")
PlotlyJS.relayout!(fig1,
xaxis=PlotlyJS.attr(title="Speed, m/s"),
yaxis=PlotlyJS.attr(title="Range, m",range=[0,3000])
)
fig1.plot.data[1][:colorbar][:title] = "Power, dB"
fig1.plot.data[1][:colorbar][:titleside] = "right";
display(fig1)
return
end
function helicopmotion(t,tgtmotion,BladeAng,ArmLength,BladeRate,prf = 2e4, radarpos = [0;0;0])
Nblades = size(BladeAng,2)
tgtpos,tgtvel = tgtmotion(1/prf)
RotAng = BladeRate*t;
scatterpos = [0 ArmLength*cos.(RotAng .+ BladeAng);0 ArmLength*sin.(RotAng .+ BladeAng);zeros(1,Nblades+1)].+tgtpos
scattervel = [0 -BladeRate*ArmLength*sin.(RotAng .+ BladeAng);0 BladeRate*ArmLength*cos.(RotAng .+ BladeAng);zeros(1,Nblades+1)] .+tgtvel
_,scatterang = rangeangle(scatterpos,radarpos)
return scatterpos,scattervel,scatterang
end
function spectrogramm_ped(x,t_step;down_lim = -35)
out,f,t = EngeePhased.Functions.spectrogram(sum(x;dims=1)[:];
window = DSP.kaiser(128,10),
noverlap=120,
nfft=256,fs=1/t_step,
centered=true,freqloc = "yaxis",out = :data
)
out_sig = map(x -> x < down_lim ? down_lim : x,DSP.pow2db.(abs.(out)))
fig = Plots.heatmap(
t[:],f,out_sig,color= :jet,
gridalpha=0.5,
colorbar_title = "Power, dBW",
xticks=0:0.5:3,
yticks=-500:100:500,
)
Plots.xlabel!("Time, from")
Plots.ylabel!("Doppler Frequency, Hz")
return fig
end
function calc_spectrogram_quad(Data,ts,T;limit = -150)
x = Data./maximum(abs.(Data))
dT = T/length(x)
F = 1/dT
spec_quad = DSP.spectrogram(x,128,120;window=DSP.kaiser(128,3.95),nfft=512,fs=F)
power_quad = map(x -> x < limit ? limit : x,pow2db.(spec_quad.power))
power_quad_quad_new = zeros(size(power_quad))
power_quad_quad_new[1:round(Int64,size(power_quad,1)/2),:] .= power_quad[round(Int64,size(power_quad,1)/2)+1:end,:]
power_quad_quad_new[round(Int64,size(power_quad,1)/2)+1:end,:] .= power_quad[1:round(Int64,size(power_quad,1)/2),:]
fig = Plots.heatmap(spec_quad.time*1e3, fftshift(spec_quad.freq)*1e-3, power_quad_quad_new,color= :jet,
gridalpha=0.5,ylims=(-10,10),xlims=(0,500),colorbar_title = "Power, dBW",
xticks=0:50:500,yticks=-10:2:10)
Plots.xlabel!("Time, ms")
Plots.ylabel!("Doppler frequency, kHz")
Plots.title!("Spectrogram of the reflected signal from a helicopter")
return fig
end
function helperAnnotateSpectrogram(fig)
Plots.plot!(fig,[20;50],[4;7],linewidth=2,c=:white,lab="",arrow=Plots.Arrow(:close, :tail, 0.5, 1))
Plots.annotate!(50, 7.5, ("Blade 1", 10, :white, :center),annotationfontfamily="Roboto")
Plots.plot!(fig,[70;120],[4;5.5],linewidth=2,c=:white,lab="",arrow=Plots.Arrow(:close, :tail, 0.5, 1))
Plots.annotate!(120, 6, ("Blade 2", 10, :white, :center),annotationfontfamily="Roboto")
Plots.plot!(fig,[20;50],[-4;-7],linewidth=2,c=:white,lab="",arrow=Plots.Arrow(:close, :tail, 0.5, 1))
Plots.annotate!(50, -7.5, ("Blade 3", 10, :white, :center),annotationfontfamily="Roboto")
Plots.plot!(fig,[70;120],[-4;-5.5],linewidth=2,c=:white,lab="",arrow=Plots.Arrow(:close, :tail, 0.5, 1))
Plots.annotate!(120, -6, ("Blade 4", 10, :white, :center),annotationfontfamily="Roboto")
Plots.plot!(fig,[0;250],[0;-0.1],linewidth=3,c=:white,lab="",arrow=Plots.Arrow(:close, :both, 0.5, 1))
Plots.annotate!(120, -1, ("Period", 10, :white, :center),annotationfontfamily="Roboto")
Plots.plot!(fig,[124;125],[0.2;4],linewidth=3,c=:white,lab="",arrow=Plots.Arrow(:close, :both, 0.5, 1))
Plots.annotate!(137, 2, ("Rotation speed", 10, :white, :left),annotationfontfamily="Roboto")
end
function plotting_svd(x)
Plots.plot(10*log10.(x),lab="",ylabel="Singular values",xlabel="rank")
Plots.plot!([55], seriestype="vline", label="",ls=:dashdot,color="red",lw=2)
Plots.plot!([101], seriestype="vline", label="",ls=:dashdot,color="red",lw=2)
Plots.plot!([109], seriestype="vline", label="",ls=:dashdot,color="red",lw=2)
Plots.annotate!(25, -10, ("A", 10, :black, :left),annotationfontfamily="Roboto")
Plots.annotate!(75, -10, ("B", 10, :black, :left),annotationfontfamily="Roboto")
Plots.annotate!(102, -10, ("C", 10, :black, :left),annotationfontfamily="Roboto")
Plots.annotate!(175, -10, ("D", 10, :black, :left),annotationfontfamily="Roboto")
end
1. The concept of the microdopler effect
The concept of micro-movements is inextricably linked with the microdopler effect*:
Micro–movement is a slight movement or deviation of a component part of an object, which is additional to the main volumetric movement of the whole object [1]. The source of micro-motion can be a vibrating surface, rotating rotor blades of a helicopter, a walking person making periodic movements with his arms and legs, flapping wings of a bird, or other reasons.
The microdopler effect is a phenomenon associated with the enrichment of the spectral composition of the reflected signal, which occurs during radar research as a result of micro-movements of objects.
Let's consider 2 scenarios for the movement of an object: a simple translational movement (top picture) and a complex translational-rotational movement (bottom picture).
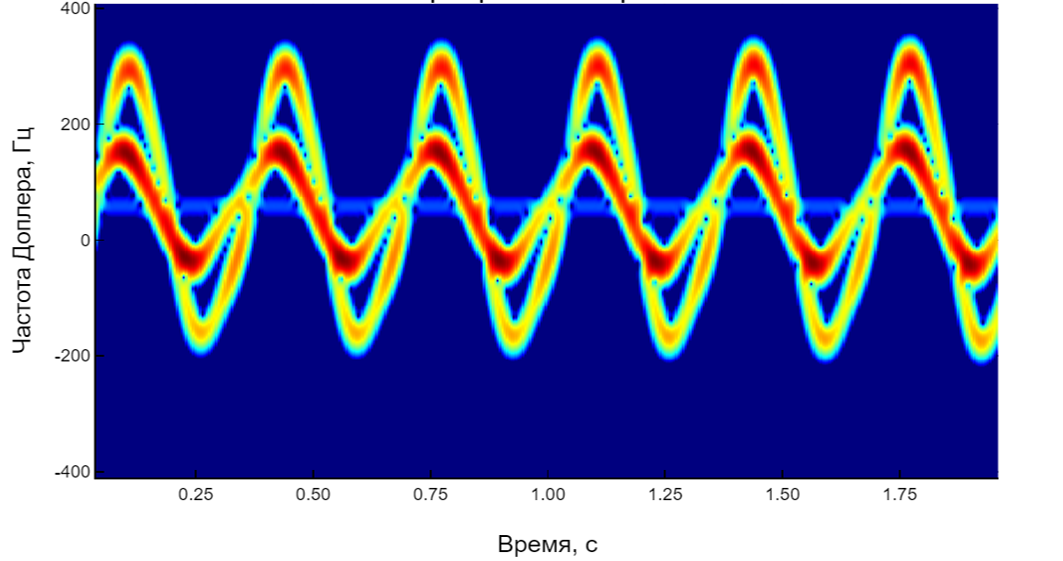
In case 1, the object is moving towards us uniformly, so the Doppler frequency has a constant value, independent of time.
In the second case, the situation changes: rotational motion (for example, the rotation of helicopter blades) introduces periodically changing components into the spectrum of the reflected signal, which characterize the microdopler effect.
A spectrogram of a reflected signal containing Microdopler components in the spectrum is called Microdopler signatures (or abbreviated as MDS). An example of a bird's MDS is given below:
.png)
2. Simulation of pedestrian MDS
In the next section, we will consider the creation of an automotive radar based on a continuous signal from an LFM to identify a crossing on the road.
2.1 Descriptions of the model scenario
The model considers the following scenario:
- a car with a radar is moving along the inside lane at a speed of 30 km/h from the origin towards a parked car and a pedestrian;
- A parked car is located at a distance of 39.4 m
- A pedestrian is moving at a speed of 1 m/s
A visualization of the scenario is given below:
.png)
2.2 Model Parameters
High range and speed resolution is required to identify the transition. In automotive radars, a continuous linear frequency modulated (FM) signal is used to meet the characteristics.
bw = 250e6 # signal band, Hz
fs = bw # sampling rate, Hz
fc = 24e9 # carrier frequency, Hz
tm = 1e-6 # scan time, s
c = 3e8 # speed of light, m/s
egocar_pos = [0;0;0] # m, the position vector of the car with radar
egocar_vel = [30*1600/3600;0;0] # m/s, the speed vector of a car with radar
parkedcar_pos = [39;-4;0] # m, the vector of the position of the car in front
parkedcar_vel = [0;0;0] # m/s, the velocity vector of the car in front
ped_pos = [40;-3;0] # m, pedestrian position vector
ped_vel = [0;1;0] # m, pedestrian velocity vector
ped_heading = 90 # hail, the pedestrian's initial direction of movement
ped_height = 1.8; # pedestrian height
2.3 Formation of system objects
To formalize the reflected signal of a pedestrian object, use the system objects EngeeRadars.BackscatterPedestrian
wav_fmcw = EngeePhased.FMCWWaveform(
SampleRate=fs, # sampling rate
SweepTime=tm, # scan time
SweepBandwidth=bw # signal band
)
# From a car with radar
egocar = EngeePhased.Platform(
InitialPosition=egocar_pos, # starting position
Velocity=egocar_vel, # velocity vector
OrientationAxesOutputPort=true # enabling the spatial orientation output port
)
# The formation of the object in front of the car
parkedcar = EngeePhased.Platform(
InitialPosition=parkedcar_pos, # starting position
Velocity=parkedcar_vel, # speed
OrientationAxesOutputPort=true # enabling the spatial orientation output port
)
parkedcar_tgt = EngeePhased.RadarTarget(PropagationSpeed=c,OperatingFrequency=fc,MeanRCS=10)
# Pedestrian object formation
ped = EngeeRadars.BackscatterPedestrian(
InitPosition=ped_pos, # starting position
InitHeading=ped_heading, # the initial direction of movement
PropagationSpeed=c, # signal propagation speed
OperatingFrequency=fc, # carrier frequency
Height=ped_height, # height
WalkingSpeed=1 # The speed of movement
)
# Distribution channels: to the pedestrian and the nearest car
chan_ped = EngeePhased.FreeSpace(
PropagationSpeed=c, # The speed of propagation
OperatingFrequency=fc, # carrier frequency
TwoWayPropagation=true, # accounting for bidirectional propagation
SampleRate=fs # sampling rate
)
chan_pcar = EngeePhased.FreeSpace(
PropagationSpeed=c, # The speed of propagation
OperatingFrequency=fc, # carrier frequency
TwoWayPropagation=true, # accounting for bidirectional propagation
SampleRate=fs # sampling rate
)
# receiver and transmitter
tx = EngeePhased.Transmitter(PeakPower=1,Gain=25)
rx = EngeePhased.ReceiverPreamp(Gain=25,NoiseFigure=10);
2.4 Simulation of the model
For the correct display of the pedestrian's MDS, it is necessary to accumulate the reflected signal during at least one cycle of human movement. The pedestrian's speed is 1 m/s, so it takes 2 seconds to complete the cycle. Let's simulate a pedestrian movement scenario for 2.5 seconds in 1 ms increments.:
Tsim = 2.5 # Simulation time
Tsamp = 0.001 # simulation calculation step, with
npulse = round(Int64,Tsim/Tsamp) # number of pulses
# Memory allocation under:
xr = complex(zeros(round(Int64,fs*tm),npulse)) # total reflected signal
xr_ped = complex(zeros(round(Int64,fs*tm),npulse)) # reflected signal from pedestrian
@inbounds for m = 1:npulse
# calculation of current position, speed, orientation and viewing angle
# to a pedestrian and a parked car
pos_ego,vel_ego,ax_ego = egocar(Tsamp)
pos_pcar,vel_pcar,ax_pcar = parkedcar(Tsamp)
pos_ped,vel_ped,ax_ped = move(ped,Tsamp,ped_heading)
_,angrt_ped = rangeangle(pos_ego,pos_ped,ax_ped)
_,angrt_pcar = rangeangle(pos_ego,pos_pcar,ax_pcar)
# calculation of the reflected signal
global x = tx(wav_fmcw()) # probing signal
# transmission of signals in the forward and reverse propagation channel
xt_ped = chan_ped(repeat(x,1,size(pos_ped,2)),pos_ego,pos_ped,vel_ego,vel_ped)
xt_pcar = chan_pcar(x,pos_ego,pos_pcar,vel_ego,vel_pcar)
xt_ped = reflect(ped,xt_ped,angrt_ped) # reflected signal from the transition
xt_pcar = parkedcar_tgt(xt_pcar) # reflected signal from the car
xr_ped[:,m] = rx(xt_ped) # received signal from pedestrian
xr[:,m] = rx(xt_ped+xt_pcar) # received signal from pedestrian
end
# transferring the signal to the zero frequency
xd_ped = conj(dechirp(xr_ped,x))
xd = conj(dechirp(xr,x));
2.5 Processing of the received signal
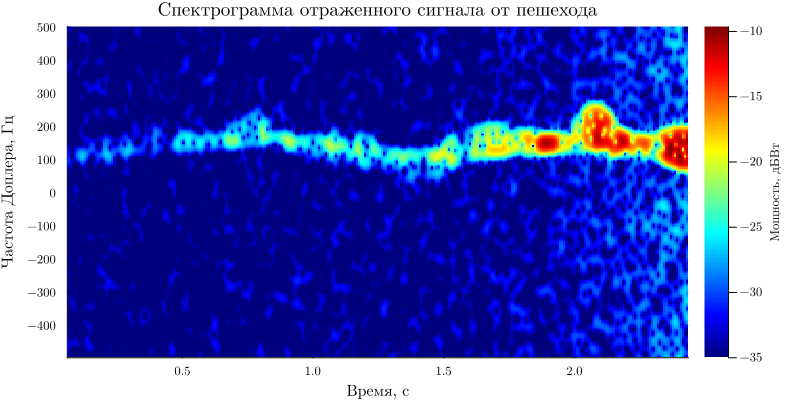
In the simulated signal xd_ped it contains only the pedestrian's response, and xd It contains the response of both a pedestrian and a parked car. If we create a spectrogram using only the reflected signal from a pedestrian, we get the following MDS:
spectrogramm_ped(xd_ped,Tsamp;down_lim = -35)
title!("A spectrogram of the reflected signal from a pedestrian")
The spectrogram of the total reflected signal from a pedestrian and a car looks like this:
spectrogramm_ped(xd,Tsamp;down_lim = -35)
title!("Spectrogram of reflected signal from pedestrian and car")
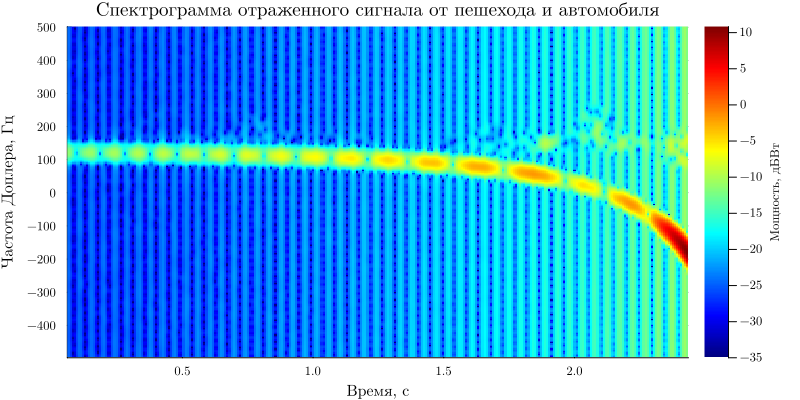
It can be noted that the vehicle's MDS dominates the pedestrian's MDS. Therefore, a pedestrian cannot be detected without additional processing.
2.6 SVD decomposition processing
To detect a weaker signal based on a strong one, you can use singular value decomposition to identify the area of interest.
out_svd = svd(xd,full=true) # calculation of the decomposition component
uxd,sxd,vxd = out_svd.U,out_svd.S,out_svd.V; # reading the S,U,V matrices
Using the function plotting_svd let's display the main diagonal singular matrix S:
plotting_svd(sxd)
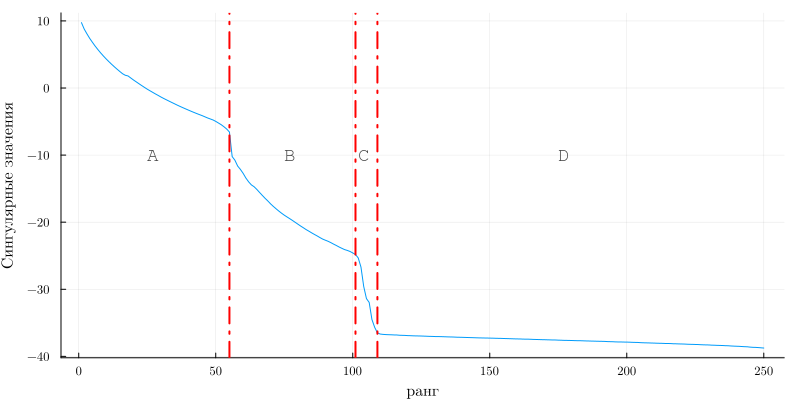
On the graph of the dependence of the signal values on the rank of the matrix, 4 areas can be conditionally distinguished:
- A - includes the main signal, which makes a significant contribution to the spectrogram;
- B - a combination of pedestrian and car signals, with the dominance of the second
- C - a combination of pedestrian and car signals, with the former dominating;
- D is the noise contribution of the receiving device.
Therefore, in order to effectively isolate the pedestrian's MDS, it is necessary to extract from the entire spectrogram the area C located within the range of the rank 103-110:
rk = 103:110 # the range of ranks of the matrix of signular values
# calculation of the processed spectrogram
sxd_new = [sxd;zeros(size(vxd,1)-length(sxd))]
xdr = uxd[:,rk]*Diagonal(sxd_new)[rk,:]*vxd';
We will build the pedestrian and car MDS again after additional processing (for correct display, we will reduce the lower limit to -40 dB since the main power has been removed):
spectrogramm_ped(xdr,Tsamp;down_lim = -40)
title!("MDS of pedestrian and car after SVD transformation")
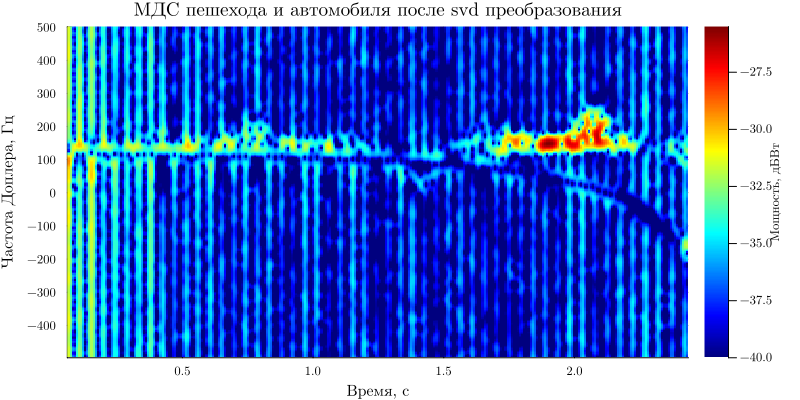
After filtering the signal from the car, a clear picture of the pedestrian's MDS is formed, while the level of the car's MDS has significantly decreased.
Thus, with the help of additional processing (svd decomposition), it was possible to isolate the spectral components of a pedestrian against the background of an interfering signal from a nearby car.
3. Helicopter MDS simulation
3.1 Description of the model scenario
Consider the case:
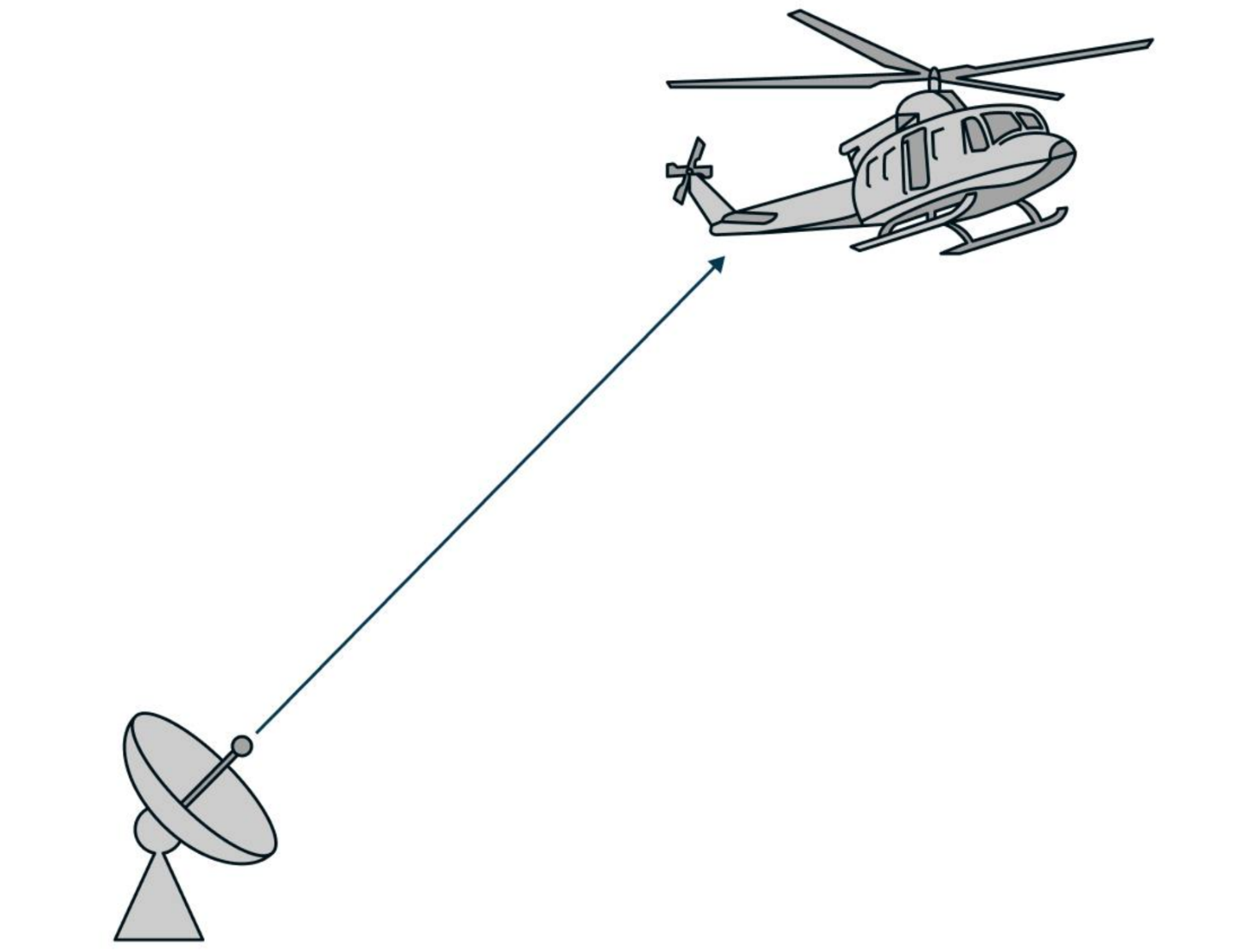
- The helicopter flies at a distance of [-25,500,500] meters evenly in the x-z plane at a speed of 100 m/s along the x axis.
- The radar is stationary and located at the origin.
In this case, at the beginning of the movement, the helicopter approaches the radar, and after moving to the positive area of the x-axis, it will begin to move away. A visualization of this scenario is given below.:
.png)
3.2 Model parameters
Let's set the parameters of the radar and target (helicopter) movement scenario:
radarpos = [0;0;0] # radar position vector, m
radarvel = [0;0;0] # radar velocity vector, m/s
tgtinitpos = [-25;500;500] # the initial position of the target, m
tgtvel = [100;0;0]; # target speed, m/s
Next, we will form the geometry of the helicopter, specifying its main parameters (number of blades, length of blades, speed of rotation of the propeller):
f_rot = 4 # screw rotation speed, c
Nblades = 4 # number of blades
bladeang = Matrix((0:Nblades-1)')*2*pi/Nblades # вектор углов лопастей
bladelen = 6.5 # blade length, m
bladerate = deg2rad(360*f_rot); # The rotation speed of the screw is rad/s
The next stage is the formation of a radar station. Let's set the fundamental parameters of the system:
c = 3e8 # signal propagation speed, m/s
fc = 5e9 # carrier frequency, Hz
fs = 1e6 # sampling rate, Hz
prf = 2e4 # pulse repetition rate, Hz
lambda = c/fc; # wavelength, m
3.3 Creating system objects
Now, using the parameters of the target scenario and the radar system, we will create system model objects using the library EngeePhased:
# Goal formation
helicop = EngeePhased.RadarTarget(
MeanRCS=[10 .1 .1 .1 .1], # EPR of helicopter elements (fuselage and 4 blades)
PropagationSpeed=c, # The speed of propagation
OperatingFrequency=fc # carrier frequency of the signal
)
tgtmotion = EngeePhased.Platform(InitialPosition=tgtinitpos,Velocity=tgtvel)
# Probing signal generator
wav = EngeePhased.RectangularWaveform(
SampleRate=fs, # sampling rate
PulseWidth=2/fs, # pulse duration
PRF=prf # pulse repetition rate
)
# Antenna array formation (rectangular 4x4)
ura = EngeePhased.URA(
Size=[4 4], # antenna array size
ElementSpacing=[lambda/2 lambda/2] # the distance between the elements
)
tx = EngeePhased.Transmitter() # The transmitter
rx = EngeePhased.ReceiverPreamp() # The preamp
# Distribution environment
env = EngeePhased.FreeSpace(
PropagationSpeed=c, # propagation velocity, m/s
OperatingFrequency=fc, # carrier frequency, Hz
TwoWayPropagation=true, # accounting for bidirectional propagation
SampleRate=fs # sampling rate
)
# Transmitting AR
txant = EngeePhased.Radiator(
Sensor=ura, # AR geometry
PropagationSpeed=c, # propagation velocity, m/s
OperatingFrequency=fc # carrier frequency, Hz
)
# The receiving AR
rxant = EngeePhased.Collector(
Sensor=ura, # AR geometry
PropagationSpeed=c, # propagation velocity, m/s
OperatingFrequency=fc # carrier frequency, Hz
);
3.4 Running a simulation of the model
We implement the calculation of the radar operation scenario when the helicopter is moving by calling system objects in a loop.:
NSampPerPulse = round(Int64,fs/prf) # number of samples in 1 pulse
Niter = Int64(1e4) # number of iterations (number of pulses emitted)
y = complex(zeros(NSampPerPulse,Niter)) # memory allocation for the reflected signal
@inbounds for m in 1:Niter
# Helicopter position and speed update
t = (m-1)/(prf) # time simulation step
global scatterpos,scattervel,scatterang = helicopmotion(t,tgtmotion,bladeang,bladelen,bladerate,prf,radarpos)
# calculation of the reflected signal
x = txant(tx(wav()),scatterang) # probing signal
xt = env(x,radarpos,scatterpos,radarvel,scattervel) # Wednesday's signal
xt = helicop(xt) # reflected signal from helicopter
global xr = rx(rxant(xt,scatterang)) # received signal
y[:,m] = sum(xr;dims=2) # beam formation
end
3.5 Signal processing
Using a system object RangeDopplerResponse we implement range-Doppler processing:consistent range filtering and spectral processing based on speed FFT.
rdresp = EngeePhased.RangeDopplerResponse(
PropagationSpeed=c, # signal propagation speed
SampleRate=fs, # sampling rate
DopplerFFTLengthSource="Property", # The method of setting the FFT (in the CO parameters)
DopplerFFTLength=128, # FFT length
DopplerOutput="Speed", # Doppler output (speed)
OperatingFrequency=fc # carrier frequency
)
mfcoeff = getMatchedFilter(wav)
fig1 = plotResponse(rdresp,y[:,1:128],mfcoeff)
setting_plotlyjs(fig1);
It can be noted that the range-Doppler portrait captures the presence of 3 components: the central component is the fuselage of the helicopter, and the lateral components are the rotation of the blades.
Let's estimate the radial velocity of the helicopter:
tgtpos = scatterpos[:,1] # the helicopter's position at the end of the simulation
tgtvel = scattervel[:,1] # helicopter speed at the end of the simulation
tgtvel_truth = radialspeed(tgtpos,tgtvel,radarpos,radarvel)
println("radial velocity of the helicopter fuselage $(round(tgtvel_truth;sigdigits=3)) m/s")
We will also look at the maximum and minimum values of the radial speeds of the screws.:
maxbladetipvel = [bladelen*bladerate;0;0] # the speed of the propeller blades
vtp = radialspeed(tgtpos,-maxbladetipvel+tgtvel,radarpos,radarvel)
vtn = radialspeed(tgtpos,maxbladetipvel+tgtvel,radarpos,radarvel)
println("maximum radial velocity value $(round(vtp;sigdigits=3)) m/s")
println("minimum radial velocity value $(round(vtn;sigdigits=3)) m/s")
Let's perform consistent filtering and build a spectrogram of the reflected signal.:
# Consistent filtering
mf = EngeePhased.MatchedFilter(Coefficients=mfcoeff) # consistent filter
ymf = mf(y) # processing
ridx = findmax(sum(abs.(ymf);dims=2)[:])[2]; # range peak detection
# Building an MDS
T = Niter/prf # duration of the spectrogram
fig1 = calc_spectrogram_quad(ymf[ridx,:],1/prf,T;limit=-100)
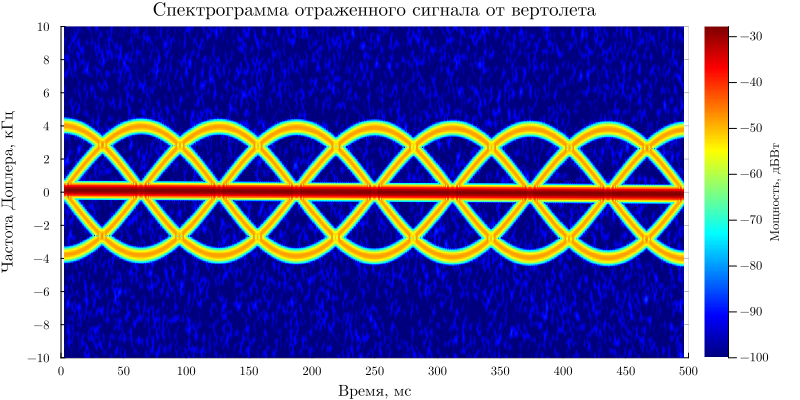
The central component characterizes the reflected signal from the helicopter fuselage, the periodic components are the rotation of the blades. We visualize the components of the MDS using the function helperAnnotateSpectrogram:
helperAnnotateSpectrogram(fig1)
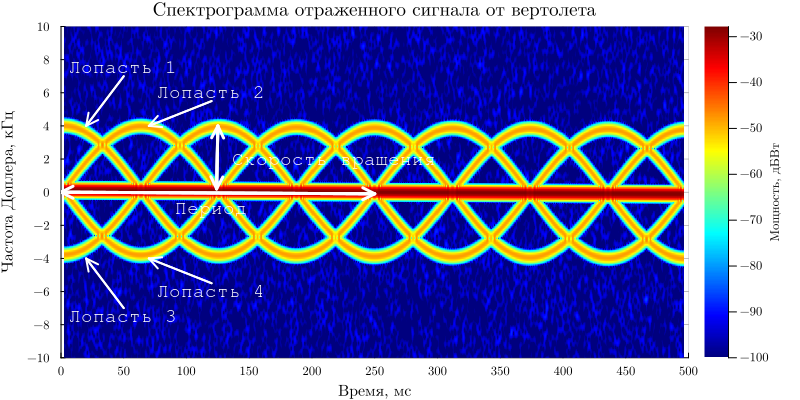
The oscillation period, which is approximately 250 ms, can be estimated from the graph of the spectrogram. In this case, the estimated number of blades is:
Tp = 250e-3 # the MDS period
bladerate_est = 1/Tp # estimating the number of blades
println("Estimation of the number of blades $(round(bladerate_est;sigdigits=2))")
The maximum deviation of the Doppler frequency is approximately 4 kHz, then the radial velocity of the helicopter blades is estimated as:
f_doppler = 4e3 # the amplitude of the Doppler frequency, Hz
Vt_detect = dop2speed(f_doppler,lambda)/2
println("Radial velocity of the blades $(Vt_detect) m/s")
To estimate the true speed, it is necessary to determine and solve the pelingation problem based on the angle of the location. Let's use the "Music" algorithm implemented in the system object. MUSICEstimator2D:
doa = EngeePhased.MUSICEstimator2D(
SensorArray=ura, #
OperatingFrequency=fc, # carrier frequency
PropagationSpeed=c, # signal propagation speed
DOAOutputPort=true, # turning on the angular direction output
ElevationScanAngles=-90:90 # scanning range by location angle
)
_,ang_est = doa(xr) # calculation of viewing angles
Vt_est = Vt_detect/cosd(ang_est[2]) # estimating the speed of the blades
println("Blade velocity estimate $(round(Vt_est;sigdigits=3)) m/s")
Knowing the estimates of the speed and number of blades, we will determine the approximate length of the blade.:
bladelen_est = Vt_est/(bladerate_est*2*pi)
println("Blade length estimate $(round(bladelen_est;sigdigits=3)) m")
The true length value is 6.5 m, hence the error was 4%.
Conclusion
In the example, the concept of the "microdopler effect" and Microdopler signatures is considered. Using the EngeePhased system objects, MDS reflected signals were modeled for 2 radar scenarios: a ground-based radar in the presence of an aerial target - a helicopter and an automobile radar in the presence of a pedestrian and a nearby car.