A generative network for synthesizing signals
This example shows how a generative neural network (GAN) can be used to synthesize realistic radar signals. This can be useful for increasing the training sample, modeling scenarios, or generating data with limited access to real-world measurements.
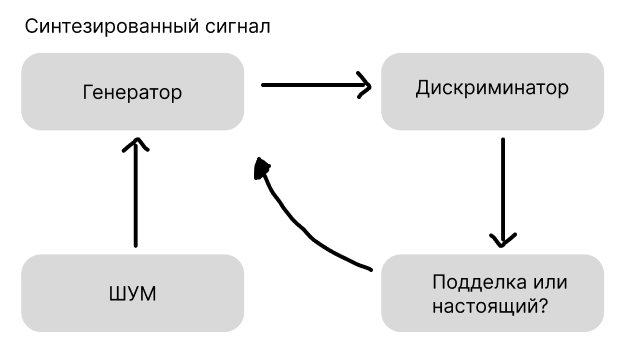
A generative-adversarial network is two neural networks in which a generator takes a noise signal as input and tries to make a plausible signal out of it, and the discriminator receives either this synthesized signal or a real one and learns to distinguish a fake from reality by transmitting an error to the generator so that over time it becomes better at masking its fakes.
The generator receives noise as a one-dimensional signal from a random distribution and transforms it through a chain of neural network layers into a synthesized signal, which outwardly should strive to be similar to the real signal.
The discriminator receives either a synthesized signal from the generator or a real signal from the training set as input. After that, it passes it through its own network to decide whether it is real or fake, and issues a probability estimate.
Based on this estimate, the error is calculated for both parts of the system and the generator learns to improve its syntheses in order to deceive the discriminator. The discriminator learns to more accurately distinguish a fake from a real signal. As they learn, both ANNs improve their abilities, and over time, the synthesized signal becomes almost indistinguishable from the real one.
Importing the necessary packages for work
include("$(@__DIR__)/InstallPackages.jl")
using Pkg
Pkg.instantiate()
using Glob
using DSP
using CUDA
using Flux
using Statistics
using cuDNN
using BSON: @save, @load
using Zygote
Since the functions used have a fairly large number of lines of code, they have been moved to separate files.jls that are imported below
The model.jl file implements the structure of the model used. The dataset.jl file is used to implement the logic of the dataset module.
Dirpath = "$(@__DIR__)"
include(joinpath(Dirpath, "model.jl"))
include(joinpath(Dirpath, "dataset.jl"))
Creating a data loader
Next, we will create a data loader that will load data into the model in batches. In the block below, we will initialize the dataset.
The dataset logic is written in the dataset.jl file
The dataset slices the ECG and radar signal onto the overlaid windows. Slicing allows you to reduce the load on the ANN due to the use of long sequences, and the use of overlap allows you to take into account time dependencies.
function mycollate(batch)
radar = hcat(first.(batch)...)
ecg = hcat(last.(batch)...)
return radar, ecg
end
ds = RadarECG("prepareRadarData");
N = length(ds)
train_idx = 1:N
X_train = [ ds[i][1] for i in train_idx ]
Y_train = [ ds[i][2] for i in train_idx ]
batch_size = 64
train_loader = Flux.DataLoader((X_train, Y_train);
batchsize = batch_size,
shuffle = true,
partial = true,
parallel = true,
collate = mycollate
);
After that, we will determine the device on which the model will be trained. If you have access to a GPU, training will be accelerated by several orders of magnitude. We will also transfer the data loader to the device we are using.
device = CUDA.functional() ? gpu : cpu;
device == gpu ? train_loader = gpu.(train_loader) : nothing;
Initializing models
Next, we initialize the ANN generator and discriminator, and also define the optimizers used, in this case, Adam.
nz = 100
net_G = Generator(nz)
net_D = Discriminator()
net_G = gpu(net_G)
net_D = gpu(net_D);
η_D, η_G = 5e-5, 2e-4
optD = Adam(η_D, (0.5, 0.999)) # without WeightDecay
optG = Adam(η_G, (0.5, 0.999));
Let's define the path where the trained models will be saved.
isdir("output")||mkdir("output")
Dirpath = "$(@__DIR__)"
train_path = joinpath(Dirpath, "output");
Model training
Let's define the functions that perform GAN training, as well as loss functions for each of the subnets - the generator and the discriminator.
function discr_loss(real_output, fake_output)
real_loss = Flux.logitbinarycrossentropy(real_output, 1f0)
fake_loss = Flux.logitbinarycrossentropy(fake_output, 0f0)
return (real_loss + fake_loss) / 2
end
generator_loss(fake_output) = Flux.logitbinarycrossentropy(fake_output, 1f0)
function train_discr(discr, original_data, fake_data, opt_discr)
ps = Flux.params(discr)
loss, back = Zygote.pullback(ps) do
discr_loss(discr(original_data), discr(fake_data))
end
grads = back(1f0)
Flux.update!(opt_discr, ps, grads)
return loss
end
Zygote.@nograd train_discr
function train_gan(gen, discr, original_data, opt_gen, opt_discr, nz, bsz)
noise = randn(Float32, 2, nz, bsz) |> gpu
loss = Dict()
ps = Flux.params(gen)
loss["gen"], back = Zygote.pullback(ps) do
fake_ = gen(noise)
loss["discr"] = train_discr(discr, original_data, fake_, opt_discr)
generator_loss(discr(fake_))
end
grads = back(1f0)
Flux.update!(opt_gen, ps, grads)
return loss
end
Let's start the training
train_steps = 0
epochs = 100
verbose_freq = 40
for ep in 1:epochs
@info "Epoch $ep"
for (i, (radar, _)) in enumerate(train_loader)
radar = reshape(radar, size(radar,1), 1, size(radar,2)) |> gpu
radar .+= 0.05f0 .* randn(Float32, size(radar)) |> gpu
loss = train_gan(net_G, net_D, radar, optG, optD, nz, batch_size)
if train_steps % verbose_freq == 0
noiseZ = randn(Float32,2,nz, batch_size) |> gpu
P_real = mean(sigmoid.(net_D(radar)))
P_fake = mean(sigmoid.(net_D(net_G(noiseZ))))
@info("[$ep/$(epochs)] step $train_steps " *
"P(real)=$(round(P_real,digits=3)) " *
"P(fake)=$(round(P_fake,digits=3))")
end
train_steps += 1
end
end
Next, we will save the trained models
# Transferring models to the CPU
train_dir = joinpath(Dirpath, "output")
net_D_cpu = cpu(net_D)
net_G_cpu = cpu(net_G)
# Ways to save
output_dir_D = joinpath(train_dir, "modelsD_bson")
output_dir_G = joinpath(train_dir, "modelsG_bson")
# creating folders if there are none
isdir(output_dir_D) || mkdir(output_dir_D)
isdir(output_dir_G) || mkdir(output_dir_G)
# file names for the best models
best_path_D = joinpath(output_dir_D, "discriminator.bson")
best_path_G = joinpath(output_dir_G, "generator.bson")
# saving the best discriminator
@info "Saving the discriminator in $best_path_D"
@save best_path_D net_D_cpu
# saving the best generator
@info "Saving the generator in $best_path_G"
@save best_path_G net_G_cpu
Testing the model
Generate signals from the noise
noise = randn(Float32, 1, 100, 16) |> gpu
fake = net_G(noise)
fakec = cpu(fake);
ind = 2
plot(fakec[:, 1, ind]/6)
Conclusions
In this demo example, the GAN neural network was trained to generate synthetic data based on real data.