Hydraulic drive with analog position controller
This example shows how Physical Modeling libraries can be used to build systems covering the fields of electricity, mechanics, and isothermal fluids. In the model, the hydraulic system implemented using elements of the library of isothermal fluids regulates the position of the mechanical load in response to stress. If the control voltage is zero, then the displacement of the hydraulic drive (and the load) is also zero, and if it is +5 volts, then the displacement is 100 mm.
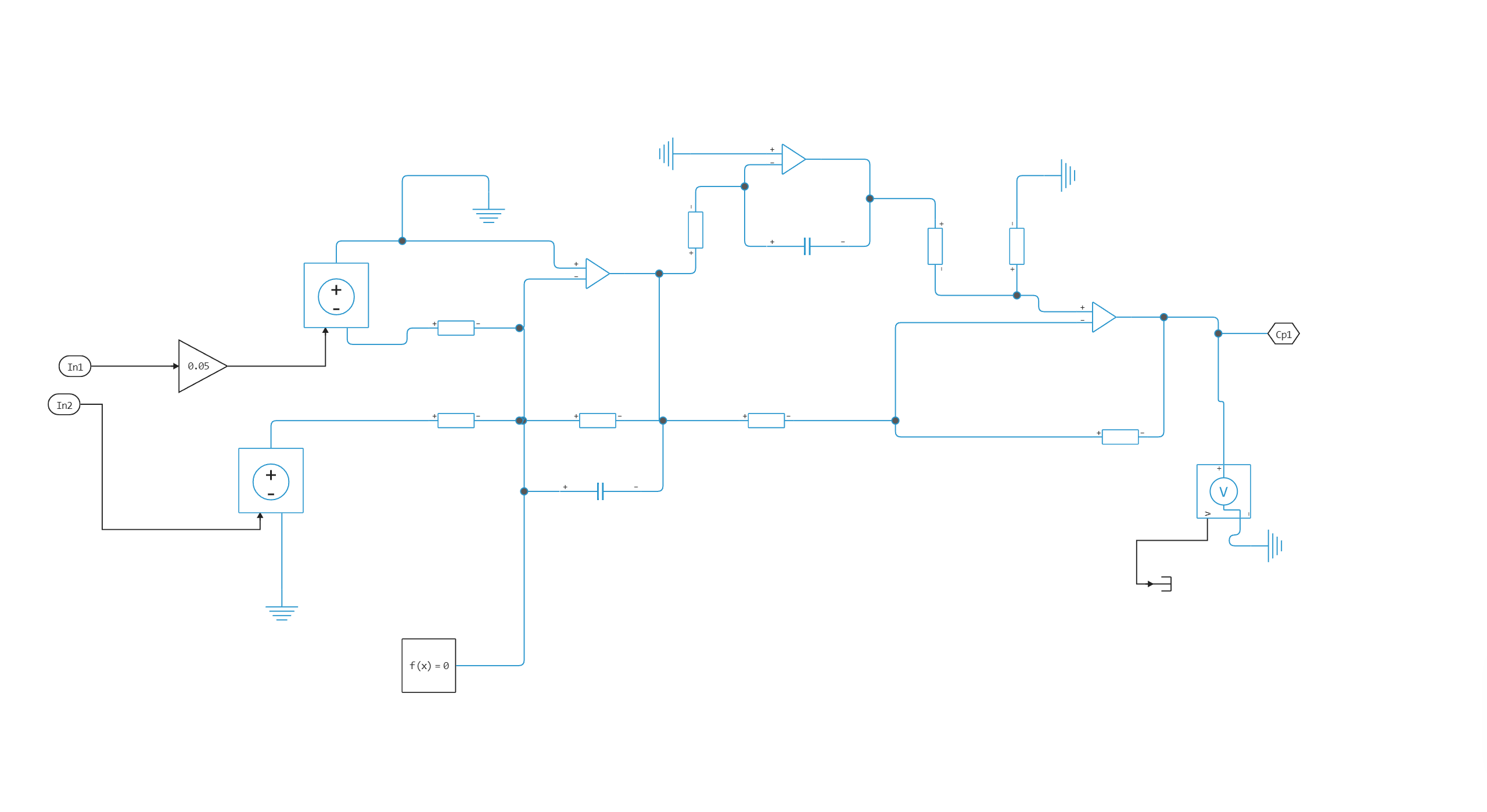
The drive control subsystem is implemented using operational amplifiers, the final stage of which is configured as a current source.
A model with this level of confidence is great for supporting the design and testing of a servo controller. It includes electromechanical high-frequency modes, as well as nonlinear effects of fluid flow.
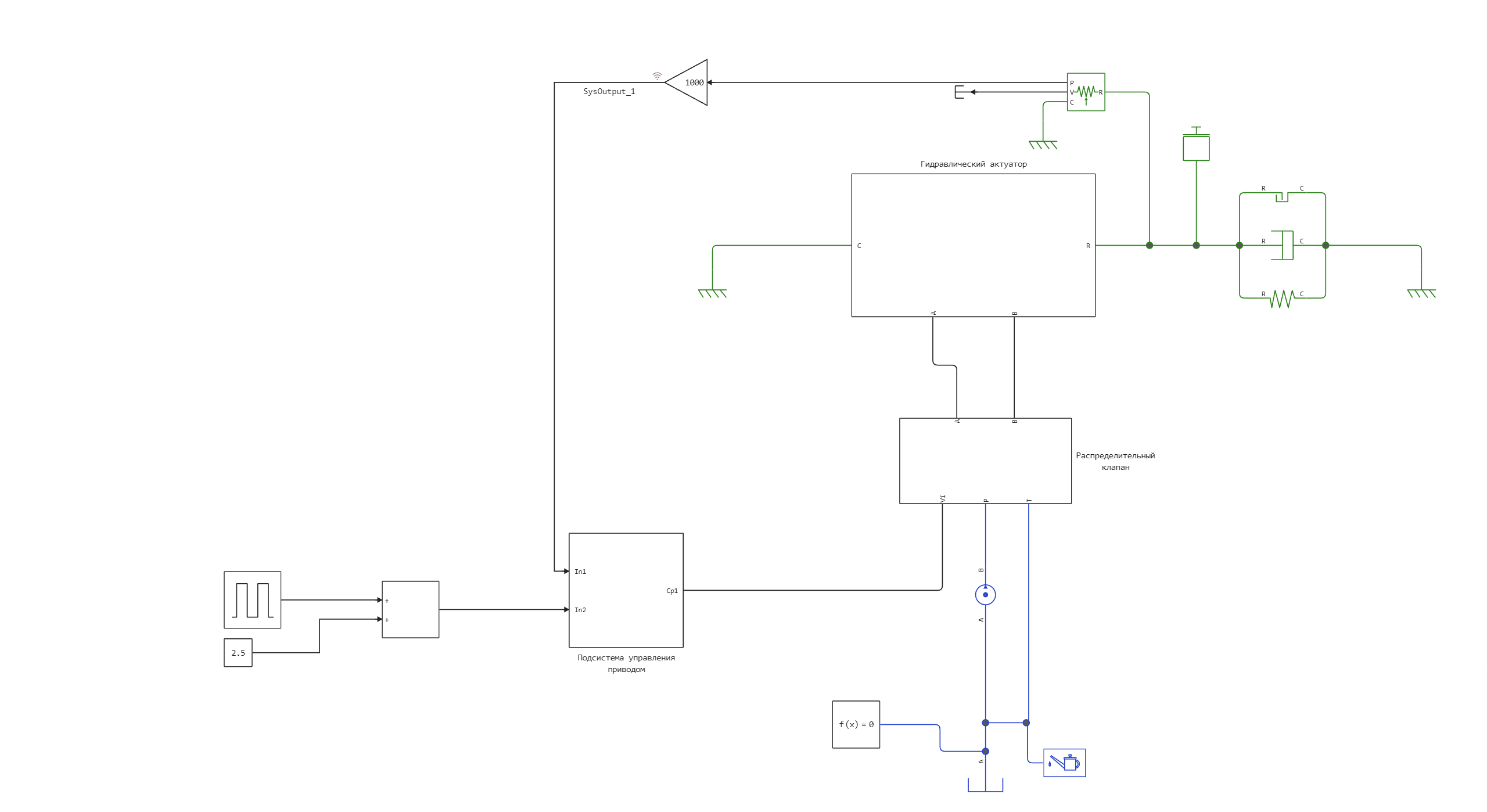
Model diagram:
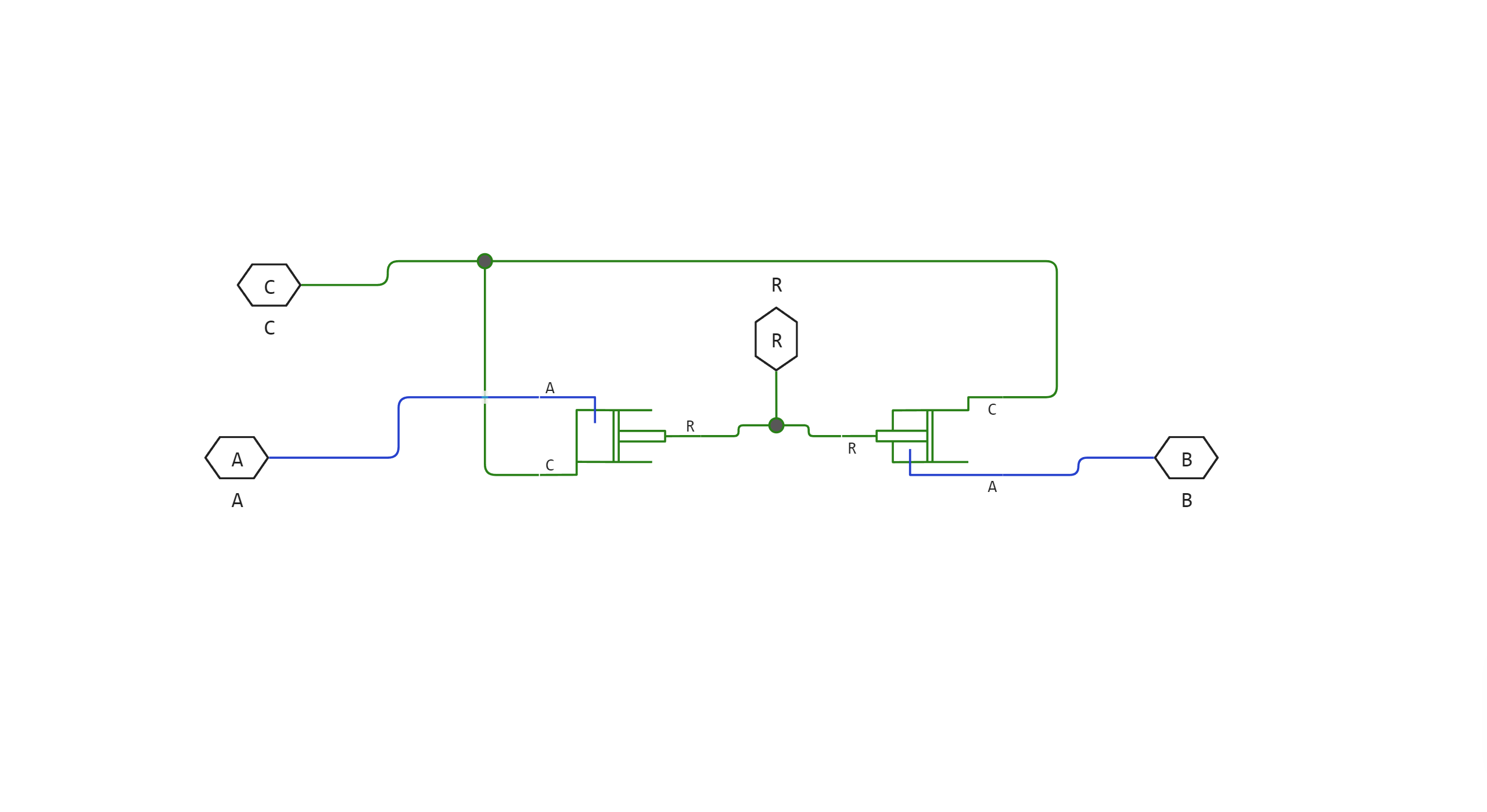
Subsystem diagrams:
Drive control subsystem:
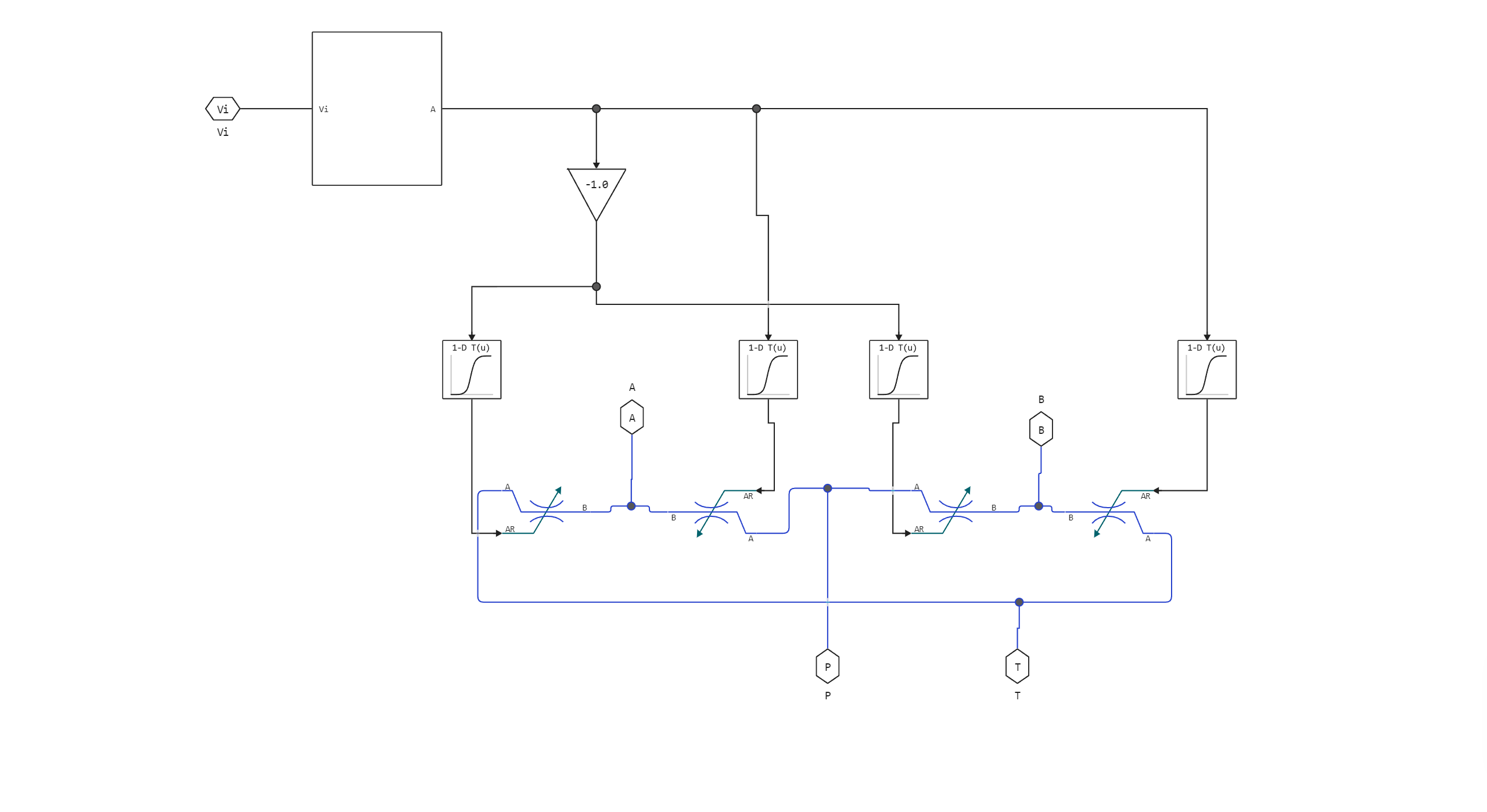
The distribution valve:
Hydraulic actuator:
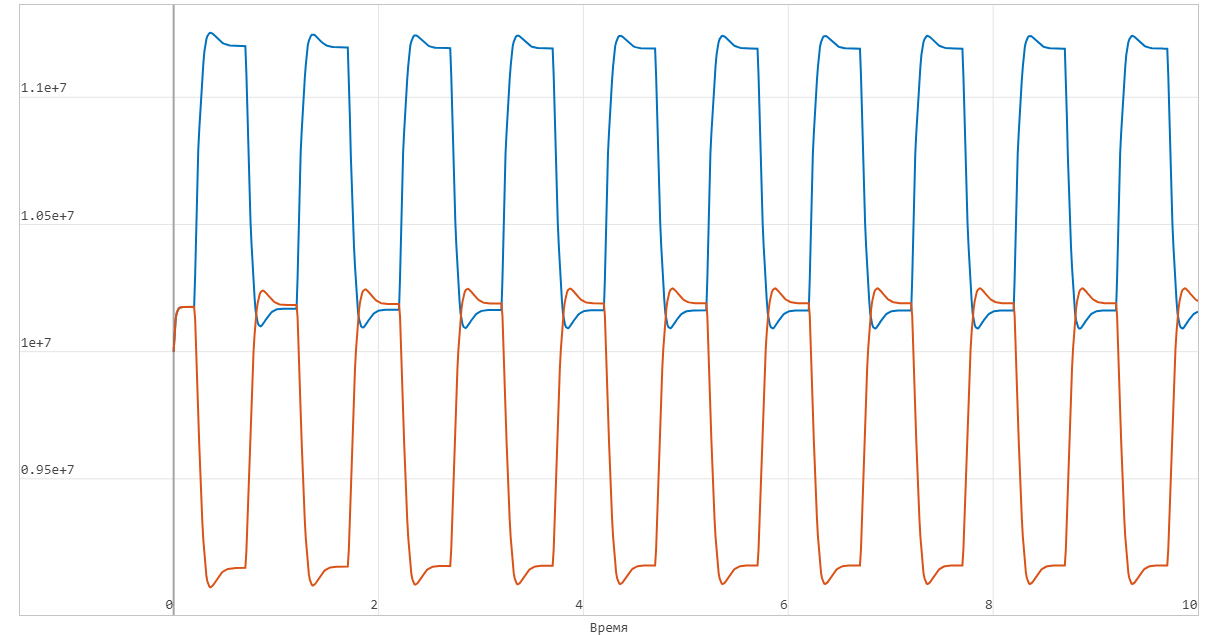
Simulation results:
Mass displacement in millimeters:
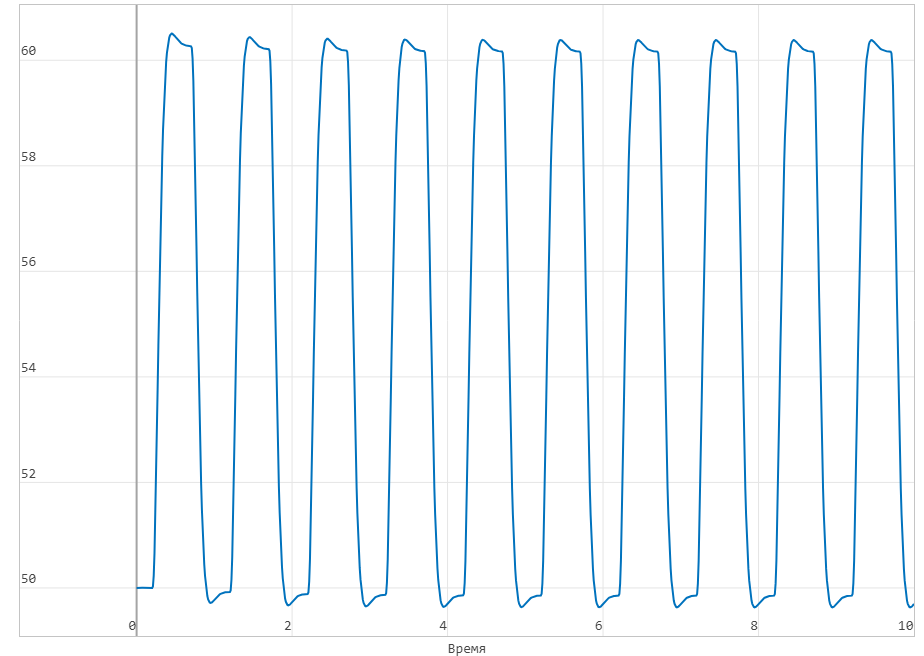
Pressure in the actuator cylinders: