Simulation of a simple mechanical system
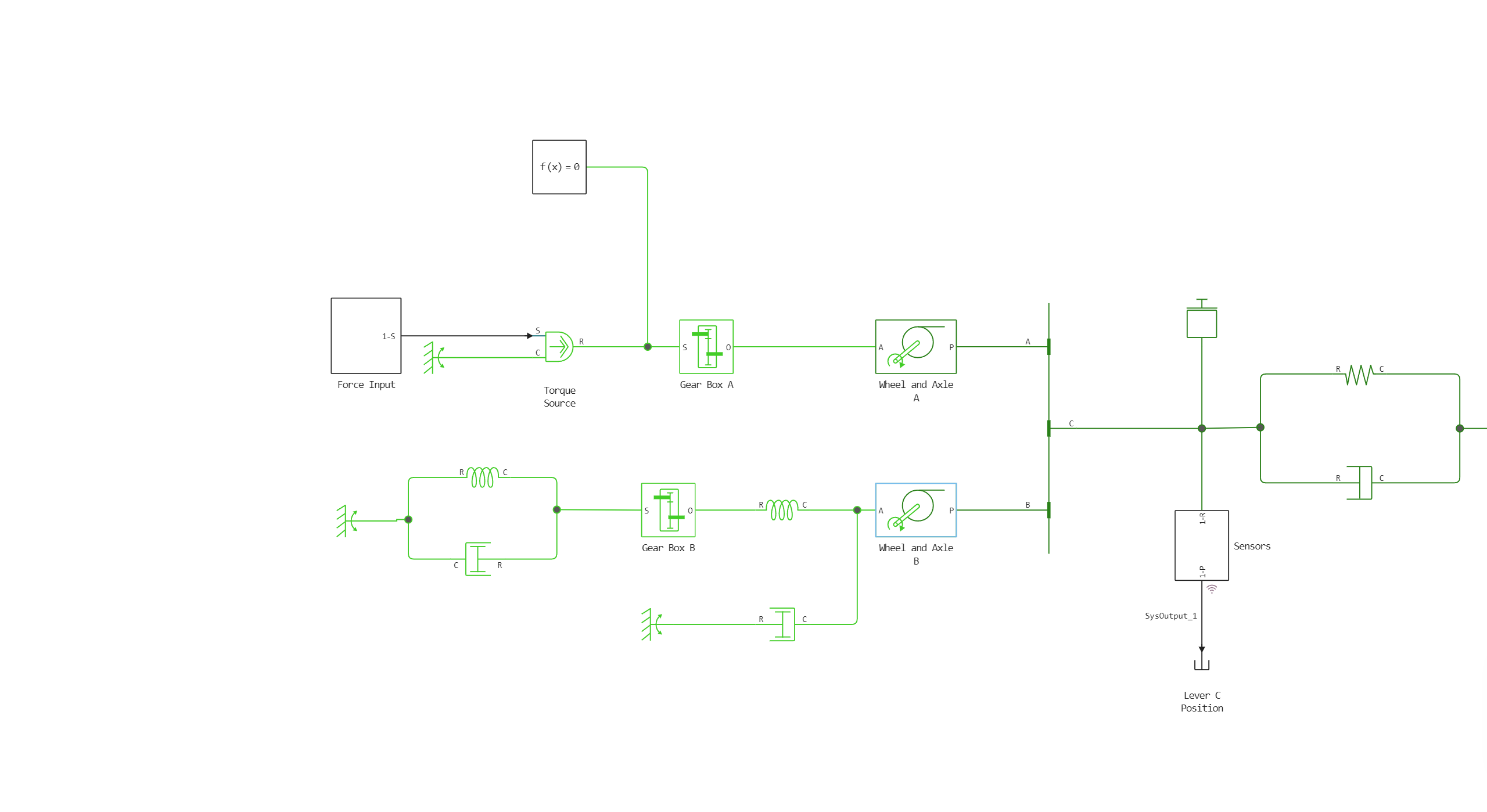
This example shows a model of a system that combines rotational and translational motion. The summing lever drives a load consisting of mass, viscous friction and a spring connected to the hinge C. The hinge B is suspended on two rotary springs connected to the reference point through the wheel, axle and gearbox. The hinge A is connected to a torque source through a gearbox and a translational to rotational motion converter.
Model diagram:
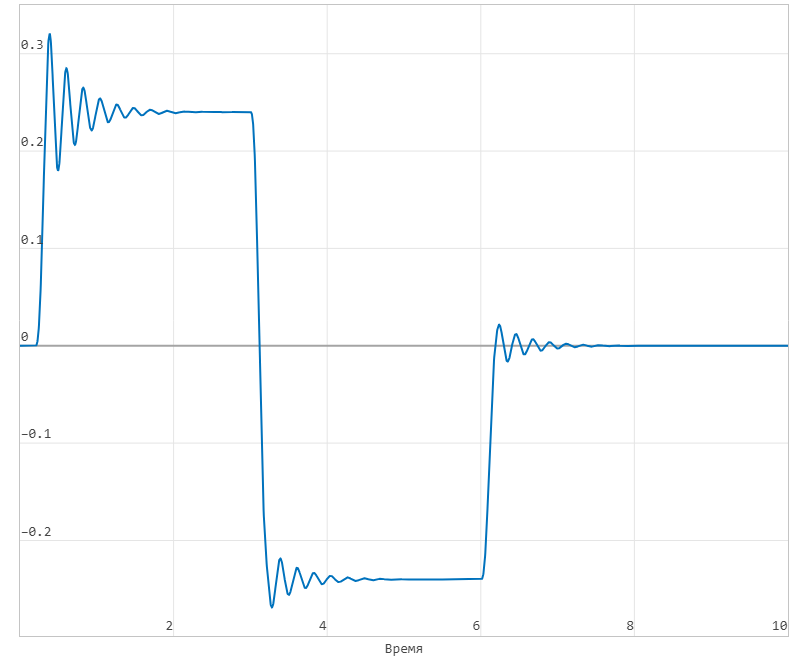
Simulation results:
Moving the mass: